
而隨著電子電氣架構繼續向跨域融合演進,智能座艙芯片算力同步提升,這些主機廠緊跟大算力芯片帶來的艙駕融合熱度,其研發重點正在從原來的行泊一體向艙駕一體進階。實際上,艙駕融合可以說是真正的跨域融合,也是電子電氣架構進一步向中央集成式邁進的關鍵一步,同時也符合降本增效的行業趨勢。
所謂艙駕一體,就是將座艙域和智駕域集成到一個高性能計算單元中,同時支持智能駕駛和智能座艙功能,參照當前比較典型的設計用例就是將座艙域芯片+駕駛域芯片+高效的CPU進行集成的艙駕一體化域控。相較于行泊一體和艙泊一體,這種架構的集成度更高,當然對硬件的要求也隨之升高。
艙駕一體系統架構的難度在哪里?
1、集中式控制難度
在集中式架構中,智能座艙域控制器和智能駕駛域控制器都被集成在一個中央控制單元中。從軟件角度來看,由于“艙駕一體化”集成系統所驅動的整體軟件架構迭代,可以獲得更多的功能或者更好的功能體驗。然而,這需要單獨適配軟件應用中心的中央控制單元負責整個車輛系統的控制和協調。基于此,這里就不得不提到控制軟件的基石:操作系統了。作為無論是底層還是上層應用算法的基礎,操作系統的重要性不言而喻。
然而,集中式智駕和智艙域控需要解決在智能系統控制中不同軟件開發平臺的兼容性問題。因為,對于智艙域來說,操作系統是基于QNX或Andriod語言編寫的,而智駕域的操作系統大多基于Linux或C++語言。如果是在域控中不同的芯片上部署不同的操作系統,其運行策略就需要考慮如何設計相應的調度接口來滿足其兩種系統下的應用程序調度和通信。
可以說,上層生態的遷移以及軟件適配的復雜度和難度將隨著智能駕駛域和座艙域融合度的增加而顯著增加,開發成本也會增加。
2、硬件設計難度
從硬件角度看,“座駕一體化”可以提高傳感器、芯片等硬件的復用率,降低成本。無論是采用一盒、一板還是一芯片方案,相比目前智能駕駛領域和座艙領域的兩盒兩芯片方案,在硬件方面都可以很好的減少域控和芯片的投入,同時也可以減少域之間的線束數量。通過將智能座艙和智能駕駛的功能集成在一個中央控制單元中,減少了電氣線束和接口的數量,簡化了系統的架構。可以說集中式架構可以降低系統的復雜性和維護成本。
然而,艙駕一體芯片設計面臨著較大的挑戰,例如設計復雜度、功耗、散熱等問題。以功耗為例,單就智駕域控而言,為了滿足其功耗和散熱的要求,其要求的芯片制程就已經開始向下探到接近于14nm甚至7nm了。而再加上智艙芯片,特別是在圖形渲染上也會占用大量的運算資源。兩者結合起來,對于合適的芯片選型要求就更高了。
3、數據傳輸及處理
艙駕一體芯片的優勢在于集成度高,可以減少系統的復雜性和成本。通過一個芯片實現座艙控制和駕駛控制的整合,可以提供更高度的系統一致性、響應性和實時性。集中式架構通過內部網絡傳輸各個子系統的數據。智能座艙域控制器和智能駕駛域控制器之間可以通過高速數據總線或以太網等方式進行數據交互和共享。
然而,數據傳輸介質和標準規格上,智駕和智艙的要求也略有不同。舉個例子,對于視頻處理這一常規的處理而言,智駕系統需要接入的視頻格式要求通常是像RGB這類原始視頻,且要求幀率一般較低。因此,在視頻傳輸介質選型上,智駕系統通常會選擇MIPI或者PCIe這類并行效率高,且較為穩定的介質。另一方面的,對智艙而言,則更加傾于傳輸方便于壓縮傳輸的原始視頻流(如YUV),或者是對原始視頻流進行壓縮處理后的HEVC/H.264視頻。且智艙對于顯示效果會更加傾向于還原實際場景,這樣就必然要求其幀率也是足夠高,比如流媒體視頻就是個典型的例子。
那么問題就來了,如果是既用于智駕又用于智艙的視頻將如何在同一個域控中被處理,比如部分視頻抽幀,視頻時間同步等問題就就會對艙駕一體域控的數據傳輸及處理能力提出新的要求。
4、系統一致性
由于智能座艙和智能駕駛都由同一個中央控制單元控制,因此系統的一致性和兼容性會得到更好的保證。比如,集中式架構通過集中處理和控制,可以更高效地處理各種輸入數據并做出相應的決策和控制,實現較好的實時性和響應性控制。
需要注意的是,集中式架構雖然具有一些優點,但也有一些潛在的缺點。
由于智駕與智艙所處理的是不同的功能模塊,一個偏駕駛性控制,另一個偏交互性控制,兩者無論是在功能安全還是信息安全上都有著完全不同的層次需求。例如,就功能安全而言,智能駕駛領域與座艙領域功能安全要求也各有不同,導致滿足車輛監管要求也隨之增加。此外,集中式架構可能存在單點故障的風險,即如果中央控制單元發生故障,整個系統都會受到影響。此外,集中式架構可能面臨處理大量數據安全的挑戰,需要考慮處理能力限制、數據傳輸的帶寬限制、以及數據入侵風險可能導致的全盤崩塌。
因此,在實際設計中,短期內艙駕一體域控難以實現平臺化、標準化、規模化。為了可以更好地協同工作,需要實現更高級別的軟硬件模塊整合。同時,需要綜合考慮系統的可靠性、性能和復雜性等因素來選擇合適的架構。
“艙駕一體”實現推手——高算力芯片計算平臺
眾所周知,座艙芯片主要的計算任務是圖形處理,包括渲染等,對GPU的算力要求高。提到這個就不得不提當前比較火熱的通過智駕感知輸出+地圖的全場景渲染需求了。對于這樣的場景重構需求而言,智艙處理能力的要求不僅僅是在傳統的2D渲染上,更多的則是在其3D渲染上。想想需要勾勒和重現的那些3D模型,以及為了實現渲染效果的真實性,這樣的處理過程要求是并行的、實時的,不難看出這將是一個十分龐大的工作量。
相較于智艙而言,智駕芯片主要的計算任務是深度學習,對NPU的算力要求高。那么如果要實現艙駕一體,那就必須同時解決GPU算力和NPU算力問題。艙駕一體化需要逐步打通智能駕駛域與座艙域之間的部門圍墻,推動組織架構一體化以提高效率。同時還要充分考慮如下一些要素的配合才行。
基于此,用于座艙和智駕的SOC芯片一般包含GPU、CPU、NPU、ISP等不同的IP模塊。在做艙駕一體的芯片選型時需要充分考慮綜合算力、帶寬、外設、內存、能效比、成本等多方面因素。同時,除開考慮芯片本身的性能外,還要綜合考慮芯片外圍生態,相關芯片的開發工具鏈,各芯片相互之間的適配性的要素,軟件模塊之間調用和通信關系等。
實際上,當前還沒有一款真正能夠由一家生態實現的完整的艙駕一體大集成式芯片。當然,當前國內外已有一些芯片廠商看到了艙駕一體的發展商機,開始花大力氣開發這樣一款既能滿足智駕又能滿足智艙的芯片,期望能在這一領域第一個搶占市場。比較典型的有智駕和智艙的龍頭老大,“英偉達”和“高通”。
筆者看來,英偉達是一家充滿野性的芯片公司,早在很久以前,應為已經牢牢占據了智駕領域的半壁江山,已被廣泛應用的Orin系列早已經為業界所熟知,而該公司研發大算力芯片的腳步卻從未停止。在去年9月,英偉達又重磅發布了大算力芯片命名為Drive Thor的芯片。該芯片最大的特點就是實現座艙域、駕駛域的融合,同時可支持多計算域間隔離,這樣,就可以很好的滿足將輔助駕駛、自動泊車、信息娛樂、DMS等多種功能整合在同一塊芯片中運行。且公司已經在不少場合官宣,Thor芯片將在2025量產。
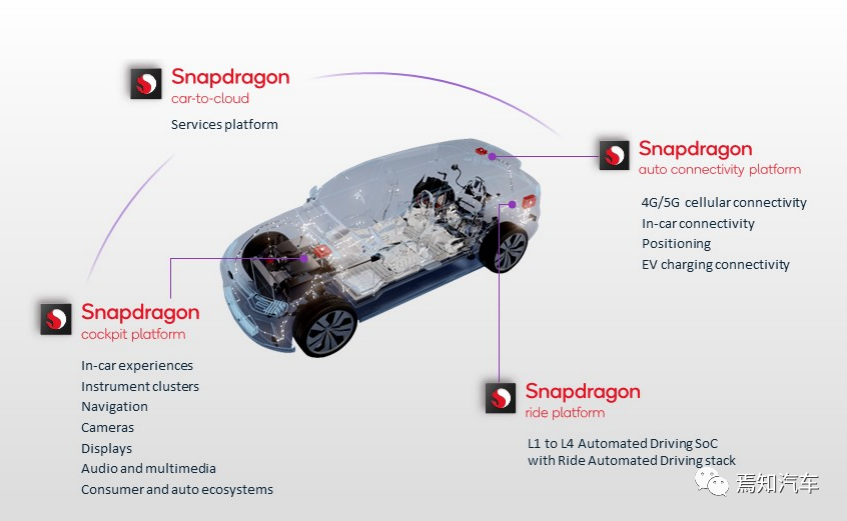
另一方面,坐穩智艙處理芯片廠商的龍頭老大——高通公司也不甘示弱。其在2023年1月推出的全新驍龍Ride Flex系統級芯片和新的自動駕駛平臺(Snapdragon Ride)可以完美的融合了高通的數字化駕駛艙和高級駕駛輔助平臺上,有助于在相同的硬件(Ride Vision)上協同處理智駕和智艙的所有應用場景。
而以上提到的兩家王者級別的芯片(NVIDIA的Drive Thor和高通Snapdragon Rideflex)其算力也是十分驚人的,據官方提前爆出的資料顯示,GPU算力均超過2000TOPS。
當然,為了跟上時代洪流,國內的多家芯片供應商也開始跟著“卷”起來。黑芝麻作為其中一家典型的芯片公司,也早在2023年4月宣布開發一款覆蓋座艙、智駕、網關等不同領域的跨域計算場景的芯片——“C1200”。雖然,目前距離艙駕一體芯片真正落地還有一段時間,但是,黑芝麻的此番官宣也是比較吸睛的。
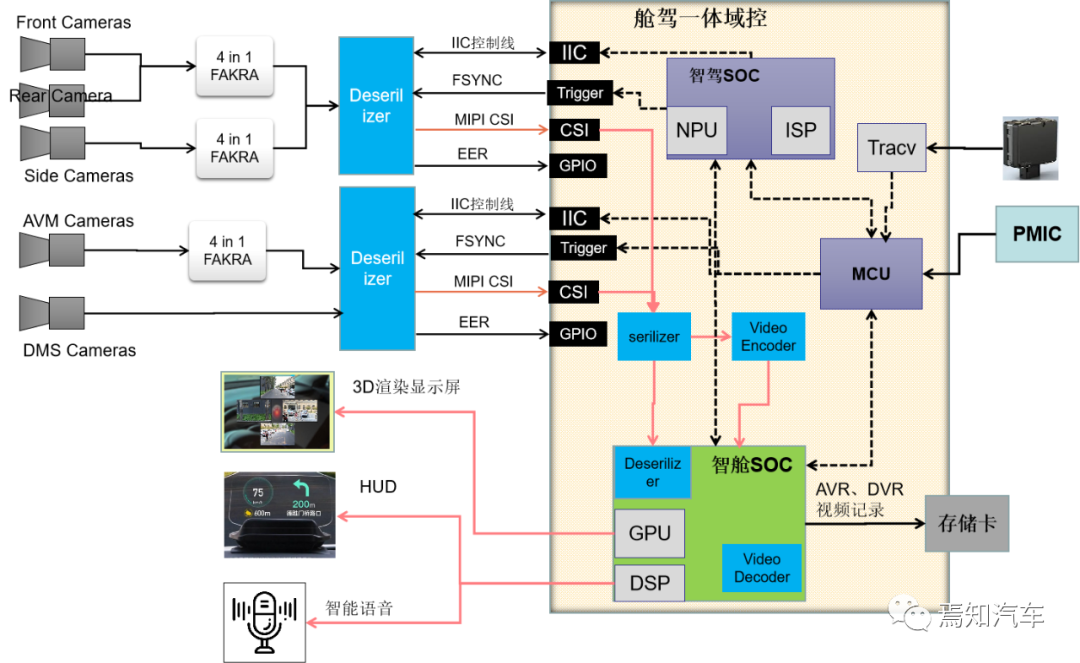
艙駕一體系統架構的設計
我們知道,智能汽車的中央控制單元采用異構單元設計,一般由 SoC 和 MCU 構成。SoC、MCU 根據應用的功能和性能要求,可以增加多個同構/異構 SoC、MCU 形成分布式計算硬件架構。對于艙駕一體域控制器而言,各個芯片系統主要通過總線和網絡進行連接,實現數據交互。為滿足智駕域與座艙域在智能駕駛和智能交互中所需求的更高算力需求,通常需要采用多個型號的 SoC 分布式計算單元,來實現算力翻倍。
智能駕駛中的艙駕一體芯片是指集成了座艙控制和駕駛控制功能的芯片。它是一種高度集成的芯片解決方案,旨在實現智能座艙和智能駕駛系統的整合。艙駕一體芯片的設計目標是在一個芯片上集成座艙控制和駕駛控制相關的功能模塊。實現的算力類型包括但不限于AI 算力、邏輯算力、GPU 算力、DSP 算力。這些算力資源需要實現的用途包括感知運算、融合運算、預測篩選運算、規劃運算、定位運算、地圖運算、拼接渲染運算、車控運算等。通過集成這些功能,艙駕一體芯片可以實現對車輛的全面控制,并提供更高級別的智能駕駛體驗。
對于艙駕一體域控設計而言,根據 SoC 和 MCU 單元組合后的架構設計,可分為 4 種常見架構形態。
(1)形態 1:SoC 和 MCU 完全獨立,一般通過 SPI 總線,實現通信互聯;
(2)形態 2:雙 SoC 通過高速總線 PCIe 級聯,實現高帶寬數據交互,GPIOs 實現低速信號通信,兩 SoC 分別通過 SPI 接口和 MCU 通信;
(3)形態 3:三個或三個以上的 SoC,通過 PCIe 連接到同一個 PCIe Switch 網關芯片,實現SoC 間高帶寬數據交互,同時各 SoC 分別通過 SPI 接口和 MCU 通信;
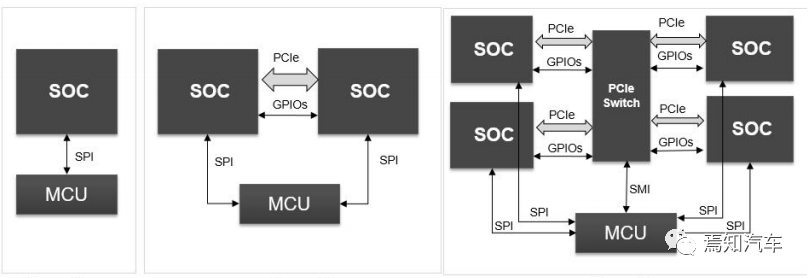
如上1、2、3這類型中央控制器的設計主要取決于新所選型的芯片能力能否完全適配上對于對應的算力需求。
從所要實現的智駕系統和座艙系統的分級標準上進行芯片選型是比較合理的一種方式。比如,針對L2級以下功能,通常智駕和智艙是可以選擇低算力平臺的一些芯片的。因為從智駕上講,50Tops+50KDMIPS已經足足夠已,而智艙而言,則基本就是一些常規的2D圖像顯示和聲音報警,甚至連像DMS這樣的處理單元都用不上的。因此,這樣的智艙芯片可能連AI算力需求都是極低的。
然而,隨著自動駕駛系統的升級,比如L2+以上的系統,在硬件選型上則更傾向于大算力、存儲、通信接口更加豐富的芯片了。
(4)終極形態:MCU 集成在 SoC 內部,通過芯片內部的 IPC 接口,實現進程通信和數據交互;

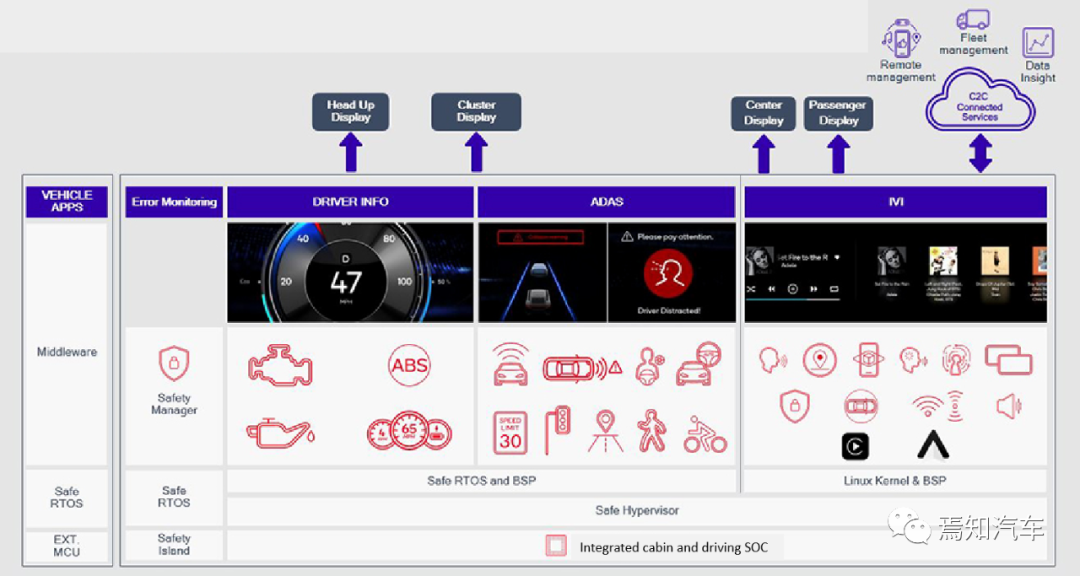
以英偉達的DRIVE Thor為例,該芯片支持多域計算,隔離自動駕駛和智能座艙相關功能。DRIVE Thor 的性能高達 2,000 teraflops的 FP8 精度,允許在不犧牲精度的情況下過渡到 8 位。將智能功能(包括自動駕駛和輔助駕駛、智能泊車、駕駛員和乘員監控、數字儀表盤、車載信息娛樂 (IVI) 和后座娛樂)統一到單一架構中,這樣可以提高效率并降低總體系統成本。通常,數十個電氣控制單元分布在車輛各處,為各個功能提供動力。
DRIVE Thor 作為第一個 NVIDIA GPU 中 Tensor Core 的新組件中的推理變壓器引擎 AV 平臺。借助該引擎,DRIVE Thor 可以將 Transformer 深度神經網絡的推理性能提高高達 9 倍,對于支持與自動駕駛相關的大量復雜的人工智能工作負載至關重要。
同時,DRIVE Thor 首次在 NVIDIA Hopper? 多實例 GPU 架構中引入的尖端 AI 功能,以及 NVIDIA Grace? CPU 和 NVIDIA Ada Lovelace GPU。這具有對圖形和計算的 MIG 支持,獨特地使 IVI 和高級駕駛員輔助系統能夠運行域隔離,從而允許并發時間關鍵流程不間斷地運行。
因此,借助 DRIVE Thor,域控開發端可以有效地將許多功能整合到單個片上系統 (SoC) 上,從而緩解供應限制并簡化車輛設計開發,從而顯著降低成本、減輕重量并減少電纜數量。
總結
未來隨著智能駕駛技術的普及,智能座艙所能發揮的空間也就越大,艙駕一體化逐漸成為發展趨勢,終極目標是將座艙域、智駕域、動力域、底盤域、車身域進行跨域大融合。而實現這一目標的前提是先做分布式融合后建立一定的局部跨域融合處理,即先將部分域的功能集成到一個高性能計算單元內,再逐漸聚合更多的功能域。隨著大算力芯片的研發落地,后續的艙駕一體甚至是整車一體化控制都會逐步實現。
轉自焉知汽車
