
1991年,本杰明·雷蒙迪(Benjamin Remondi)完成了RTK算法模型的實現,標志著RTK進入實際應用階段。32年之后的2023年,RTK已經在自動駕駛定位領域獲得了“穩準狠”的稱號,助力自動駕駛測試車輛歡快地跑在世界各地。
RTK在自動駕駛領域取得如此輝煌成績,離不開背后連續運行參考站(Continuously Operating Reference Stations , CORS)系統的支持,CORS系統將觀測值、差分改正等信息通過網絡廣播給自動駕駛車輛上接收機,助力自動駕駛車輛獲得實時厘米級定位精度。
CORS系統的關鍵就是遍布在世界各地成千上萬的基準站,截止2022年,美國已在其本土、加拿大、太平洋及波斯灣部署了超過3050個站點。而我國僅千尋位置一家公司,就建設了多達2800個站點,后面還有緊緊追趕的南方測繪、六分科技、中國移動等公司。
“要想跑,先建站,要想準,多建站”,似乎成為自動駕駛衛星高精定位發展的默認法則。但當有人站出來喊“只要給我百八十個基準站,我就能實現全球實時厘米級定位”的時候,你會翻翻白眼,心里暗想:這人是不是瘋了。
而這位瘋了的天才就是本文科普的主角——PPP-RTK。
01 RTK
故事還是先從主角的前綴實時動態定位(Real-Time Kinematic,RTK)講起。衛星發出一串速度近似光速c的衛星信號,衛星信號包含的內容如圖1所示,高頻的載波載著測距碼與導航電文穿梭于天地之間。經過時間△t后被接收機接收,△t通過將衛星信號中的測距碼與本地復制碼做相關性計算可求得,將c與△t相乘便可求得衛星與接收機之間的距離。
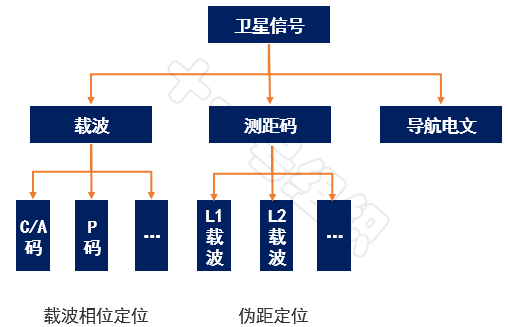
圖1 衛星信號組成
衛星位置可以通過解析衛星信號導航電文中的衛星星歷獲得,通過再建立接收機與其他可觀測衛星的幾組方程組,接收機在地面的三維空間坐標(x,y,z)便可通過解方程組順利求出,這便是衛星定位中的偽距定位法。
偽距定位法使用測距碼(C/A碼或P碼等)作為量測信號,考慮到一般接收機對測距碼碼元寬度的接收精度為1%~2%,而測距碼的一個碼元寬度又較大(C/A碼為300m,P碼為30m),所以米級定位精度是偽距定位法的理論極限,強求不得。
但是運載測距碼和導航電文的載波,頻率高、波長短,如果能測量出傳播路徑上載波在兩點之間的相位差,那么兩點之間的距離也可以求出來。以北斗為例,北斗三代B1頻點載波的中心頻率為1575.42MHz,換算成波長約為190mm,而按照測距精度為載波波長的1%~10%計算,理論上可以實現毫米級定位。
利用載波相位進行測量的原理如圖2所示。
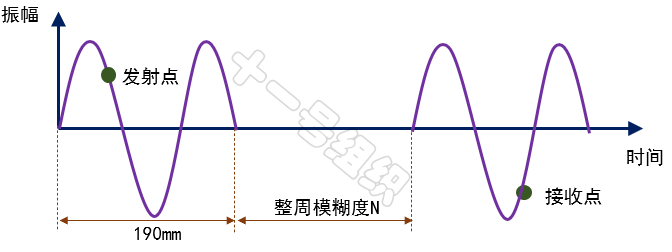
圖2 載波相位測量原理
但現實情況是,使用載波相位定位方法的精度實際上只能控制在3m左右,與自動駕駛需求的厘米級定位精度相差甚遠、與理論上可達到的毫米級定位精度相差更遠。這樣的定位精度還以引入周跳和整周模糊度N等一系列難題為代價。
我們不禁要問,究竟是哪個環節出現問題導致衛星定位誤差如此大呢?經過科學家們的不斷研究,發現影響衛星定位精度的因素主要有三類:衛星相關誤差、傳播路徑相關誤差和接收機相關誤差,各類誤差匯總如圖3所示。
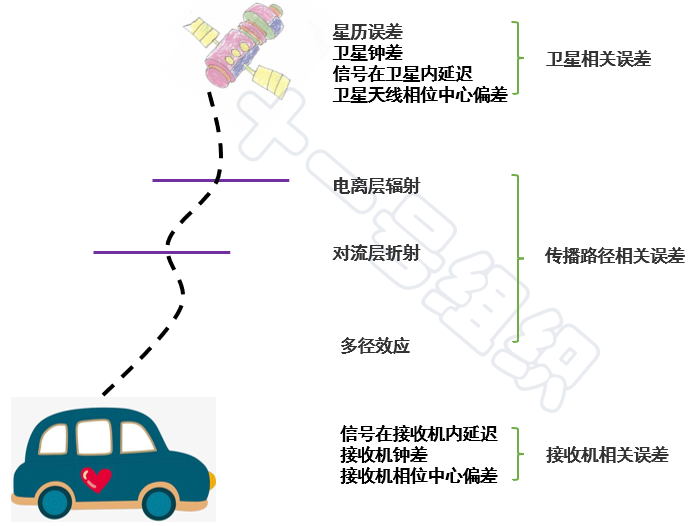
圖3 衛星定位誤差匯總
而在如何消除這些誤差、提高衛星定位精度的道路上,逐漸形成兩條不同的技術路線:差分方法和非差方法。
差分方法的理論基礎是:上述三大類誤差中除多徑效應外,均具有較強的空間相關性,將一定空間內兩臺接收機的觀測值作差,可以消除這些空間相關性誤差。
比如,當兩臺接收機同步接收同一顆衛星信號,那么觀測值中就包含了相同的衛星鐘差,將兩觀測值作差便可消除此項誤差;同理,一臺接收機在同一時刻接收兩顆衛星信號,那么觀測值中就包含了相同的接收機鐘差,將兩觀測值作差便可消除此項誤差。其他誤差類似,經過兩次減法可以消除了大部分影響衛星定位的誤差。
究竟是在測距碼層面作差還是載波相位層面作差,又將差分方法分成了碼差分法和載波相位差分方法。
碼差分法中,基準站一方面基于觀測值計算出偽距,另一方面基于基準站已知坐標和各衛星的坐標,求出每顆衛星每一時刻到基準站的真實距離,將真實距離與偽距作差,得出偽距改正信息,并廣播給接收機。
載波相位差分,就是當前耳熟能詳的傳統RTK所采用的方案,整個系統包括衛星、基準站、流動站(各種類型的GNSS接收機)、電臺等,如圖4所示。
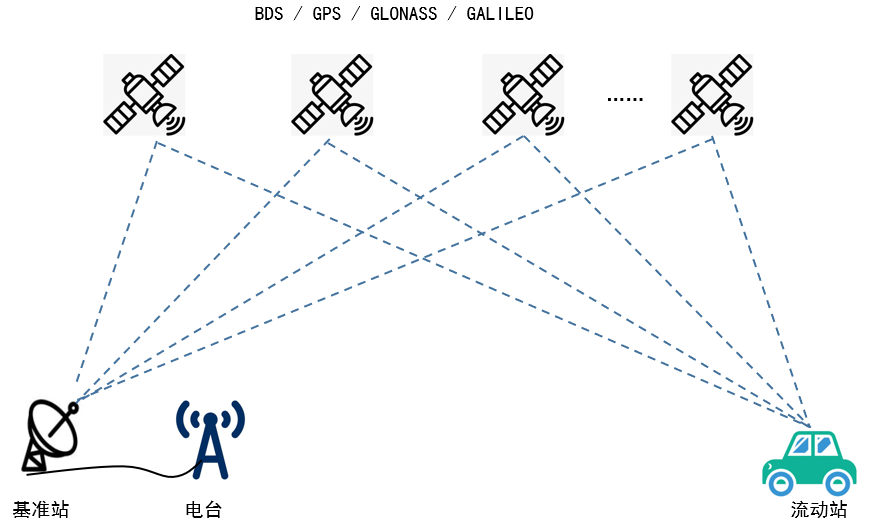
圖4 傳統RTK系統
工作時,基準站和流動站都在觀測衛星載波信號。基準站通過電臺將觀測到的衛星載波信號廣播出去,流動站收到基準站發送的信號后,與自身觀測到的衛星載波信號進行雙差模糊度的求解、基線向量的結算,從而精確地求出流動站與基準站的空間相對位置關系。隨后通過坐標轉換,將相對位置關系轉換成用戶需要的坐標。
經過RTK這么一操作,衛星定位的精度平面可達1cm+D·1ppm ,高程可達2cm+D·1ppm。其中,D為移動站與基準站的距離,1ppm值為百萬分之一,這意味著移動站離基準站每超過1公里,平面和高程就會多1毫米的誤差。
傳統RTK的定位精度、實時性均已足夠優秀,且實施簡單,哪里需要就去哪里搭建這樣一套系統,但是考慮到自動駕駛車輛不會永遠只在限定區域內測試,如何建立一個能夠覆蓋區域甚至全球的系統,考驗著服務提供商的財力和智力。
更不可接受的是,傳統RTK中衛星定位誤差的空間相關性隨移動站距離基準站的距離增加而逐漸失去線性,因此在超長距離下(約>30km),經過載波相位差分運算后,有可能無法解算出載波相位的整周模糊度,從而導致定位精度直接變為分米級或米級。
為了克服傳統RTK技術的缺陷,在20世紀90年代中期,人們提出了網絡RTK(Network RTK,NRTK)技術。
在NRTK中,普通基準站被升級為了連續運行參考站(Continuously Operating Reference Stations , CORS),并組成一個CORS系統,系統組成如圖5所示。
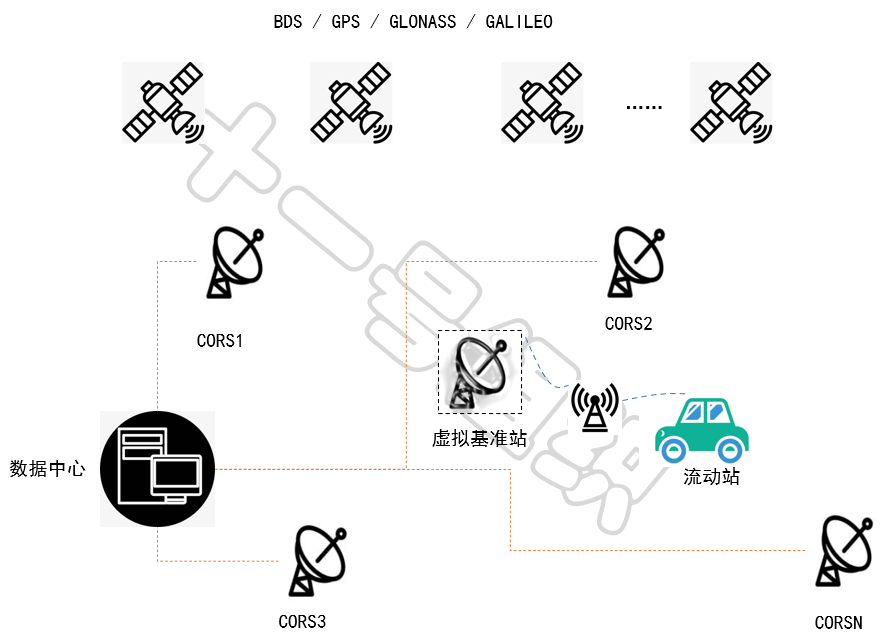
圖5 NRTK系統組成
系統中的CORS通過數據通訊網絡將觀測值傳輸至一個或多個數據處理中心,數據處理中心結合基線處理與觀測值內插技術,模擬出一個“虛擬基準站”(或選擇距離流動站最近一個CORS),通過網絡向移動站播發“虛擬基準站”(或距離最近CORS)的觀測值、差分改正等信息。
這意味著,在一定區域內,NRTK可以實現無縫覆蓋。對于用戶來說,使用NRTK,不需要自建基準站,只需要花點小錢買網絡RTK服務及支付通訊費用即可,節約了大量成本。精度和可靠性還更高,畢竟CORS系統壞一兩個站并不影響大局。
但是對于服務商來說,要想提供大范圍的無縫覆蓋,無論是RTK還是NRTK,建設成本都極高。但是一旦建成,就可以源源不斷享受用戶付費的過程,類似建成后的高速公路。
但是NRTK也不是沒有缺點,其定位精度受網絡穩定性影響極大,為了實現高精定位必須保證網絡通信穩定。這對一些偏僻山區地區道路或網絡覆蓋不是那么好的道路,還是挺有難度,因此自動駕駛車輛通常采用基于NRTK的融合定位策略。
02 PPP
非差方法奉行的宗旨就是:死磕各種誤差,對各種誤差進行精確建模或估計。精密單點定位(Precise Point Position,PPP)就是非差方法中的優秀代表,1997年由美國噴氣推進實驗室(Jet Propulsion Laboratory,JPL)的Zumberge學者提出。
PPP最大的特點就是可以用單臺接收機實現全球分米級的絕對定位。人們不禁要問,不用差分方法,定位過程中的各種誤差怎么消除呢?回答這個問題前,我們先看一個經典的PPP系統組成,如圖6所示,整個系統主要包括地面監測網、地面主控站、上行鏈路站、流動站、低軌通訊衛星和導航衛星等。
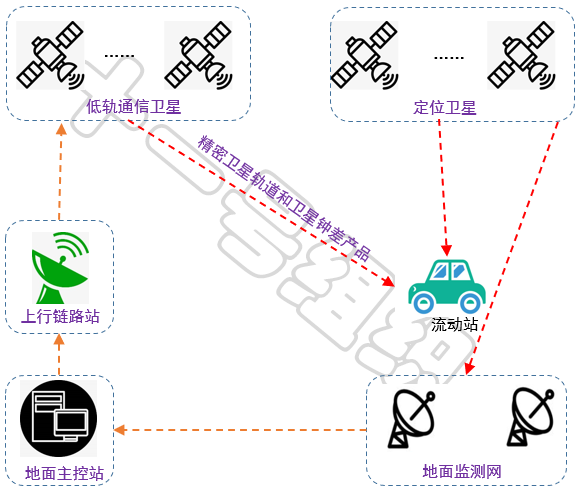
圖6 PPP系統組成
對于星歷誤差和衛星鐘差,通過在全球搭建若干基準站組成地面監測網對導航衛星進行連續觀測,并將觀測數據通過網絡發送給地面主控站。地面主控站綜合其他信息,解算出精密衛星軌道和衛星鐘差,并根據協議生成軌道改正信息和鐘差改正信息,由上行鏈路站傳輸給低軌通訊衛星,低軌通訊衛星通過衛星信號將改正信息廣播給流動站。
對于其他誤差,流動站內部在綜合考慮各項誤差精確改正的基礎上,采用合理的參數估計策略(最小二乘法、卡爾曼濾波等)進行消除。
重點來了,按照PPP的技術實現原理,其只要在全球建設百十來個基準站,組成地面監測網,用來收集解算軌道改正信息和鐘差改正信息所需的衛星信號,就可直接確定移動站在國際地球參考框架(International Terrestrial Reference Frame,ITRF)下的高精度位置坐標,且不受作用距離的限制。
相比RTK動輒成千上萬的基準站以及受作用距離限制的缺點,PPP絕對稱得上“定位一枝花”。
以上優點,也讓業界一致喊出:PPP是衛星定位技術中繼RTK/NRTK技術后出現的又一次技術革命,它的出現改變了以往只能使用差分定位模式才能實現高精度定位的局面,為全球高精度衛星定位提供了一種有效的新方法。
但是,被業界寄予厚望的PPP,誕生初期,其PPP定位精度只能達到分米級到米級,只能用于后處理無法進行實時定位,且需要近30分鐘才能實現定位的初始化,信號失鎖后的重新初始化時間與首次初始化時間幾乎一樣長。
如何提高PPP定位精度?如何實現實時PPP?如何縮短初始化時間?成為PPP在20世紀末之后發展過程中最重要的三條主旋律。
前文提到,使用載波相位觀測值進行定位的時候,會產生整周模糊度,其值通常為整數。通過算法將這一整周模糊度求解出來之后,可將定位精度控制在厘米級,這個時候的定位結果也被稱為固定解。但是也存在確實解不出整周模糊度的時候,這時定位精度只能控制在分米級,定位結果也被稱為浮點解。
整周模糊度與接收機硬件延遲誤差(碼偏差和相位偏差)高度線性相關,誤差存在也將模糊度的整數特性破壞。RTK由于采用差分方法,比較容易將硬件延遲誤差減掉,所以差分條件下模糊度的整數固定難度沒有那么大。
但是PPP采用硬剛各種誤差的非差方法,如何分離接收機端和衛星端的硬件延遲誤差,進而恢復非差模糊度的整數特性,成為PPP固定解的首要難題。
為此,業內專家學者分別提出過小數偏差、整數鐘、去耦鐘等模型方法。上述3種非差模糊度固定解求解方法在理論上是等價的,都能最終實現了模糊度固定(Ambiguity Resolution,AR),只是實現方式不同,這類方法也常被稱為PPP-AR。
PPP由浮點解到固定解技術的突破,顯著改善了PPP的定位精度,定位精度可控制在厘米級到分米級之間。
定位精度有了長足進步,剩下就是后處理PPP到實時PPP的突破。而實時PPP的關鍵,就是要有實時的精密衛星軌道和衛星鐘差產品的支持。
PPP所需的精密衛星軌道和衛星鐘差,在PPP誕生沒多久被做成一個標準產品,由外部專業組織提供。
這些外部專業組織既有國際GNSS服務(International GNSS Service,IGS)這樣的國際學術合作組織,也有世界各地商業組織利用自建的CORS系統,提供PPP服務,國外有海克斯康(Hexagon)/諾瓦泰(NovAtel)、天寶(Trimble)、約翰迪爾(NavCom)、拓普康(Topcon)、輝固集團(FurgoN,V.)等。國內有千尋位置、大有時空、六方科技和時空道宇等。
一開始的時候,這些組織提供的精密衛星軌道和衛星鐘差產品按天或周為頻率更新,只能提供給后處理領域使用。
2000年,JPL的Muellerschoen等人提出實時PPP(Real Time - Precise Point Position,RT-PPP),隨后一大波商業組織采用類似的方法,基于自己建立全球監測網的實時數據流,研發實時精密衛星軌道和衛星鐘差產品。
2007年,IGS啟動了PPP實時計劃項目,在項目的協調下,全球范圍已有超過100個基準站正在提供實時數據流。利用IGS提供的實時觀測數據流,基于地球同步軌道衛星可以實現實時估計并播發精密衛星軌道和衛星鐘差產品。
用戶只需基于自身需求付費購買相應的GNSS增強服務即可,無需自己搭建任何基準站。
至此,PPP在定位精度和實時性上面均取得了技術突破,并在地震監測、水汽遙感、低軌衛星定軌和電離層監測等領域開始小有名氣。
轉自十一號組織
