
劃重點(diǎn)
1. 智能駕駛域控制硬件方案的演講趨勢
2. 當(dāng)前主流的智駕域控硬件方案是N*SoC+ MCU,那么MCU是否可以去掉?
3. 隨著芯片集成度不斷提升,在理想的情況下,智能駕駛域控硬件方案最終是否會演變成單SoC芯片方案么?
前言:
1.早期:奧迪的zFAS(2015年4月開發(fā)完成)是智能駕駛域控制器最早期的架構(gòu)形態(tài),采用3顆SoC+MCU方案,該方案幾乎是把當(dāng)時(shí)在各個(gè)應(yīng)用領(lǐng)域性能最優(yōu)的芯片組合在了一起。zFAS模塊包含:SoC-1(Mobileye-EyeQ3 )+ SoC-2(英偉達(dá)-Tegra K1 VCM )+SoC-3(Altera-Cyclone V)+MCU(英飛凌—Aurix-TC297T)
-
Mobileye - EyeQ3 :負(fù)責(zé)前置攝像頭圖像處理;
-
NVIDIA - Tegra K1 VCM : 負(fù)責(zé)環(huán)視攝像頭圖像處理以及駕駛員的狀態(tài)監(jiān)控;
-
Altera - Cyclone V : 負(fù)責(zé)超聲波信號處理;攝像頭、毫米波雷達(dá)和激光雷達(dá)等多源傳感器數(shù)據(jù)融合;作為內(nèi)部網(wǎng)關(guān)實(shí)現(xiàn)內(nèi)部通信;
-
Infineon - Aurix TC297T :用于監(jiān)控系統(tǒng)的運(yùn)行狀態(tài),并對外進(jìn)行通信。
受限于整個(gè)行業(yè)能提供的計(jì)算平臺算力水平(EyeQ3的AI算力為0.256TOPS,Tegra K1 VCM單浮點(diǎn)運(yùn)算性能為350GFLOPS,Cyclone V的CPU算力為5250DMIPS),導(dǎo)致zFAS的整體性能水平受到了很大的限制。
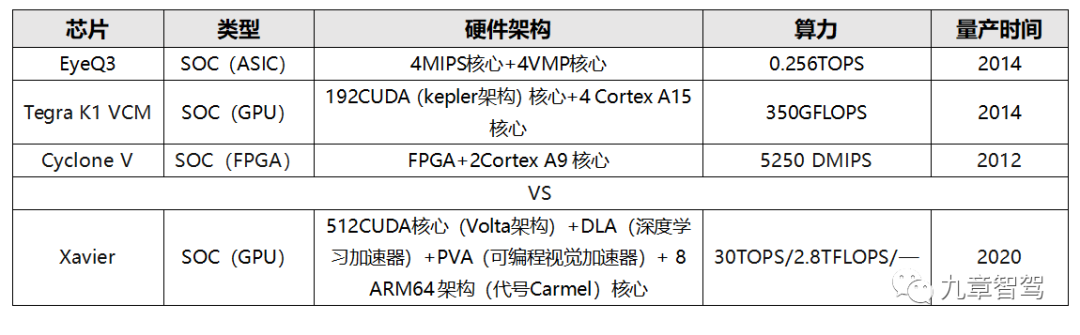
兩個(gè)不同時(shí)間段芯片性能的定性比較(信息來源:公開資料整理)

zFAS的電路主板示意圖(圖片來源 - 硬核汽車電子)
備注:該域控制器由Mobieye提供EyeQ3芯片及對應(yīng)的軟件方案,TTTech提供中間件,奧迪自研一些上層應(yīng)用算法,安波福進(jìn)行系統(tǒng)集成。
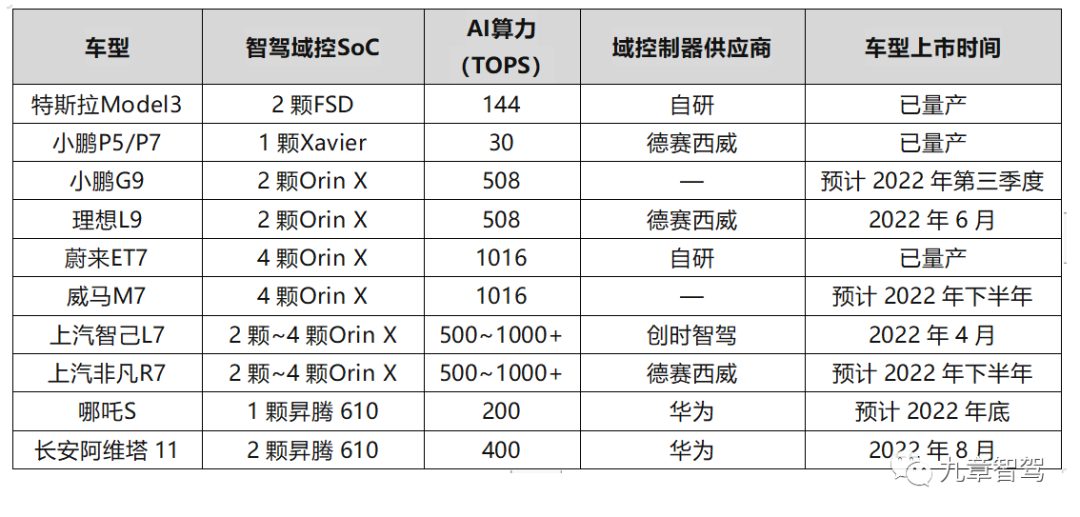
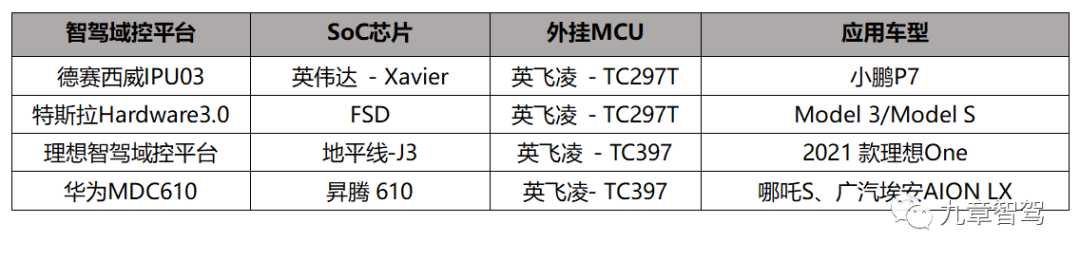
2.現(xiàn)狀:隨著芯片廠商開放度提升,SoC芯片集成的異構(gòu)資源不斷豐富,以及CPU算力和AI算力的大幅提高,行車和泊車傳感器的數(shù)據(jù)處理、數(shù)據(jù)融合等軟件算法開始逐漸地集成到一個(gè)功能更強(qiáng)大的異構(gòu)SoC里面去完成。因此,智駕域控硬件方案中選用SoC芯片的種類在減少,但仍然需要ASIL D級別的MCU作為輔助支持,比如德賽西威的IPU03:英偉達(dá)-Xavier + 英飛凌Safety MCU;華為的MDC610:昇騰610芯片+英飛凌Safety MCU。雖然有一些域控方案里依然會使用2~4顆SoC,但大都是選擇同一種型號的SoC,比如特斯拉的 Autopilot HW3.0平臺采用2顆FSD芯片;蔚來的NIO Adam域控平臺采用4顆Orin X芯片。
信息來源:公開資料整理
3.未來:隨著SoC芯片集成化程度不斷提高,越來越多的SoC芯片將會在內(nèi)部集成ASIL D等級的MCU核心-功能安全島。那么,外掛的MCU的角色有被SoC內(nèi)部的功能安全島所取代的趨勢,市場上將會逐漸出現(xiàn)越來越多的單SoC芯片域控解決方案。比如,知行科技的 IDC MID版本,通過單顆 TDA4VM芯片實(shí)現(xiàn)行泊一體方案,預(yù)計(jì)在今年下半年量產(chǎn)應(yīng)用。

備注 :
內(nèi)置MCU核心/功能安全島:通過在SoC內(nèi)部內(nèi)置MCU核心,利用鎖步的方式提升SoC芯片自身的功能安全等級,同時(shí)外設(shè)接口也會更豐富,一般會設(shè)有單獨(dú)的CAN接口,作為和整車底盤和毫米波雷達(dá)的數(shù)據(jù)通訊接口,在緊急工況下實(shí)現(xiàn)車輛的安全停車。
現(xiàn)在L2+及以上的智能駕駛域控硬件方案的形式主要是:N*SoC+MCU。其中,SoC一般主要負(fù)責(zé)感知、全局路徑規(guī)劃等,MCU則負(fù)責(zé)實(shí)時(shí)性要求很高的整車控制任務(wù)。為什么域控制器電路板上要布置一顆獨(dú)立的MCU芯片,它的作用是什么,去掉它到底行不行?
當(dāng)前已量產(chǎn)應(yīng)用的主流智駕域控硬件方案(信息來源:公開資料整理)
在整個(gè)智能駕駛解決方案中,外掛MCU 需滿足功能安全 ASIL D要求,有多路CAN總線接口和高速以太網(wǎng)接口,能與車身傳感器連接,并接收和發(fā)送車身CAN總線和以太網(wǎng)信息,從而實(shí)現(xiàn)域控平臺與整車其它節(jié)點(diǎn)進(jìn)行交互。MCU主要支持的功能如下:
1)整車底盤控制功能:作為最后一道關(guān)口,對車輛的執(zhí)行命令進(jìn)行校驗(yàn)處理,并對接底盤的控制功能;
2)狀態(tài)監(jiān)控 :供電模塊狀態(tài)、通信狀態(tài)、以及交互節(jié)點(diǎn)狀態(tài)的監(jiān)控等;
3)執(zhí)行最小安全風(fēng)險(xiǎn)策略:當(dāng)監(jiān)測到自動駕駛系統(tǒng)發(fā)生故障時(shí),外掛MCU會及時(shí)進(jìn)入最小安全風(fēng)險(xiǎn)條件,擔(dān)負(fù)起功能降級、駕駛員接管提醒、安全停車的作用。
1.2 去掉外掛MCU,到底行不行
如果打算去掉MCU,那么原先MCU干的“活”誰來接替呢?只能是SOC了,那么,現(xiàn)在SOC到底有沒有這個(gè)能力把MCU的活全干了呢?按理說是可以的,因?yàn)楝F(xiàn)在很多的SOC內(nèi)部開始集成MCU核心-功能安全島,性能也越來越接近外掛的MCU,比如TDA4VM 內(nèi)部的功能安全島,已經(jīng)可以達(dá)到ASILD等級,在一些情況下是完全可以替代外掛MCU。
但是為什么現(xiàn)在主流方案依然還是采用SOC+外掛MCU呢?經(jīng)過找業(yè)界相關(guān)專家調(diào)研咨詢,下面從技術(shù)和商業(yè)化角度來進(jìn)行簡單地進(jìn)行分析總結(jié):
1)技術(shù)上不是很成熟
雖然越來越多的芯片廠商開始考慮在SoC芯片內(nèi)部內(nèi)置MCU核心,但與傳統(tǒng)成熟工藝的MCU相比,內(nèi)置的MCU核心在功能安全、實(shí)時(shí)性和可靠性方面尚存在一些差距,畢竟任何新技術(shù)和新產(chǎn)品都需要一定的時(shí)間驗(yàn)證。
安全性不足,內(nèi)存有限
英飛凌大中華區(qū)智能駕駛市場經(jīng)理余辰杰曾在一次公開演講中提到:現(xiàn)在的 AI SoC 算力豐富,有 Cortex-A 核、NPU、GPU等。更有一些SoC內(nèi)部集成一個(gè)MCU級別的實(shí)時(shí)鎖步核,稱之為safety island。它似乎在灌輸一個(gè)概念,SoC里面加了一對鎖步核就是功能安全ASIL-D了。其實(shí)一對鎖步的實(shí)時(shí)核跟ECU系統(tǒng),甚至僅僅是芯片自身達(dá)到 ASIL – D等級都不是一個(gè)概念。而且受制于die size,成本等原因,目前一些safety island上只集成了非常有限的RAM。以一個(gè)Lockstep R5F附加1M SRAM為例,如果希望程序都運(yùn)行在RAM中,程序的體積受到明顯制約。
《2萬字長文說清自動駕駛功能架構(gòu)的演進(jìn)》一文中也表達(dá)了類似的觀點(diǎn):“未來單SoC的價(jià)格會比SoC+MCU便宜,即使單SoC也能符合功能安全ASIL D的要求(目前行業(yè)內(nèi)的大算力SoC只能做到ASIL B),也可以滿足網(wǎng)絡(luò)安全要求,但是對于完全自動駕駛安全而言做到‘相對安全’還遠(yuǎn)遠(yuǎn)不夠,需要做到‘本質(zhì)安全’,因此筆者認(rèn)為外掛MCU還是非常有必要。”
軟件移植存在風(fēng)險(xiǎn)
單SoC芯片方案尚未經(jīng)過充分的市場驗(yàn)證,用內(nèi)置的MCU核心去取代外掛MCU這種革新式的設(shè)計(jì),會有一些風(fēng)險(xiǎn)。
前宇通客車智能網(wǎng)聯(lián)副院長彭能嶺認(rèn)為,之所以現(xiàn)在主流方案還是SoC +MCU,我覺得大家還是出于一種謹(jǐn)慎的態(tài)度,畢竟不同廠家的MCU里面的硬件資源以及硬件性能都不會完全一樣。如果把外掛MCU的功能移植到內(nèi)置功能安全島,在軟件的移植過程中會帶來一些風(fēng)險(xiǎn),比如軟件漏洞、軟件缺陷等。倒不如沿用現(xiàn)在的SoC+MCU方案更穩(wěn)妥。畢竟現(xiàn)在的軟件比以前更復(fù)雜,并且國家對產(chǎn)品的安全性、合規(guī)性等要求也越來越高。因此,任何車企都不太愿意貿(mào)然去冒風(fēng)險(xiǎn)去掉外掛MCU。
2)商業(yè)上不是很合算
現(xiàn)階段投資回報(bào)率低
主機(jī)廠或者Tier1已經(jīng)習(xí)慣于把控車等功能放到外掛的MCU上去實(shí)現(xiàn),并在上面跑傳統(tǒng)的AUTOSAR CP操作系統(tǒng)。現(xiàn)在Tier1如果打算把外掛MCU的功能遷移到內(nèi)部不但需要投入人力和時(shí)間成本,同時(shí)也需要滿足一些客觀條件:第一個(gè)是SoC芯片內(nèi)置MCU核心的可靠性和功能安全等級達(dá)到了規(guī)定要求;第二個(gè)是整個(gè)軟件平臺也要有對應(yīng)的方案。從長期來看,這是一個(gè)趨勢,但過渡肯定需要時(shí)間,需要投入研發(fā)成本。
寒武紀(jì)行歌產(chǎn)品副總裁劉道福提到,對于現(xiàn)在的車型平臺,主機(jī)廠考慮到研發(fā)周期的緊迫性,一般不太愿意去嘗試和更換新的架構(gòu)方案,主機(jī)廠已經(jīng)習(xí)慣使用老的架構(gòu)方案,比如控車用TC297/397等,并且這些方案已經(jīng)很成熟。對于下一代新的平臺,主機(jī)廠有更多時(shí)間去做研發(fā),會從更高的集成度、更低的量產(chǎn)成本去考慮這件事,可能愿意投入一定的資源去做。在行歌的未來產(chǎn)品中,會考慮將MCU功能集成到SoC中,從而提高域控制器集成度,降低域控制器的整體BOM成本。
“目前國內(nèi)車廠項(xiàng)目的平臺化相對來講沒有海外體系成熟,部分車型項(xiàng)目比較碎片化一些。從Tier1的角度來講,如果僅僅是拿到了一個(gè)車型或者一個(gè)項(xiàng)目,量級可能較小,相應(yīng)的開發(fā)費(fèi)有限。外掛MCU拿掉,雖然硬件上的成本省了一點(diǎn),但把所有的綜合成本算下來,包括重新匹配AUTOSAR、以及在AUTOSAR CP上部署一些其它軟件等工作算進(jìn)去,相比沿用已成熟量產(chǎn)的現(xiàn)成方案,估計(jì)不太合算。所以它不僅僅是技術(shù)層面的可行性問題,更多還需要從商業(yè)的角度考慮。”黑芝麻智能產(chǎn)品副總裁丁丁講道。
現(xiàn)階段,外掛MCU方案作為成熟方案,具有實(shí)現(xiàn)上的便利性和成本上的優(yōu)勢
外掛的MCU已經(jīng)形成了完整的產(chǎn)業(yè)生態(tài)和明確的產(chǎn)業(yè)分工。英飛凌,NXP以及瑞薩等傳統(tǒng)MCU廠商,MCU已經(jīng)做了很多代,各方面都已經(jīng)比較成熟,在生態(tài)鏈上已經(jīng)有很多合作伙伴。有的合作伙伴負(fù)責(zé)MCU上AUTOSAR的適配,有的負(fù)責(zé)上層應(yīng)用的開發(fā),已經(jīng)形成了一個(gè)完整的產(chǎn)業(yè)鏈條,對于Tier1或者車廠來講,只要花錢就能夠找到合作伙伴幫助他們完成。
安霸軟件研發(fā)高級總監(jiān)孫魯毅認(rèn)為,外掛MCU的獨(dú)立性更強(qiáng),Tier1在它上面開發(fā)的一些軟件,做一些基礎(chǔ)性工作,比如AUTOSAR CP的適配或基于毫米波雷達(dá)的一些功能。基于一顆MCU開發(fā)的軟硬件可以反復(fù)重用,而不用顧慮主控的SoC芯片究竟選擇的是哪家,進(jìn)而可以減少Tier1的工程量,縮短開發(fā)時(shí)間、降低開發(fā)成本。
轉(zhuǎn)自九章智駕
(未完待續(xù))
