
四、路感模擬
在SBW系統(tǒng)的應(yīng)用過程中,由于沒有了傳統(tǒng)機(jī)械連接,但為了確保駕駛體驗(yàn)和感知安全,駕駛過程中需要讓駕駛員可以感受到與傳統(tǒng)機(jī)械轉(zhuǎn)向相似的“力回饋”,因此需要通過電機(jī)模擬出一定的路感反饋,即控制單元需根據(jù)實(shí)際車輛動態(tài)模擬出合理的轉(zhuǎn)向力反饋,再通過力矩電機(jī)向方向盤提供適當(dāng)?shù)淖枘岷土Ω校瑥亩柜{駛員可以感受到真實(shí)的轉(zhuǎn)向感覺。
此過程中,為使系統(tǒng)向駕駛員傳達(dá)的駕駛感受足夠真實(shí),控制單元需根據(jù)內(nèi)嵌的路感模擬模型(車輛動力學(xué)模型的一部分,該模型根據(jù)車輛實(shí)際行駛狀態(tài)和物理規(guī)律模擬出自然的轉(zhuǎn)向阻力和助力變化),然后結(jié)合傳感器數(shù)據(jù),可計(jì)算出在特定車速、轉(zhuǎn)向角度和路面條件下,駕駛員在傳統(tǒng)機(jī)械轉(zhuǎn)向系統(tǒng)下應(yīng)該感受到的轉(zhuǎn)向力。
并通過以力矩電機(jī)作為執(zhí)行機(jī)構(gòu),向其發(fā)送精確的電流控制信號,以控制該電機(jī)的力矩輸出,從而使其產(chǎn)生相應(yīng)方向和大小的力矩,并在相應(yīng)條件下模擬出不同的路面阻力和轉(zhuǎn)向阻力曲線,以讓駕駛員獲得更真實(shí)的路感反饋。
在整個過程中,控制單元始終保持對車輛狀態(tài)的實(shí)時監(jiān)控,并確保在緊急情況下能迅速調(diào)整反饋力度,以確保駕駛安全。期間若出現(xiàn)相應(yīng)故障,系統(tǒng)將自動切換至安全模式,如提供一個恒定但不至于令駕駛員失去控制力矩的固定反饋。通過此方式,SBW系統(tǒng)成功地模擬了傳統(tǒng)機(jī)械轉(zhuǎn)向的路感反饋,從而提供了一種既有真實(shí)駕駛體驗(yàn)又能適應(yīng)不同駕駛情境的轉(zhuǎn)向解決方案。對此過程示意如下:
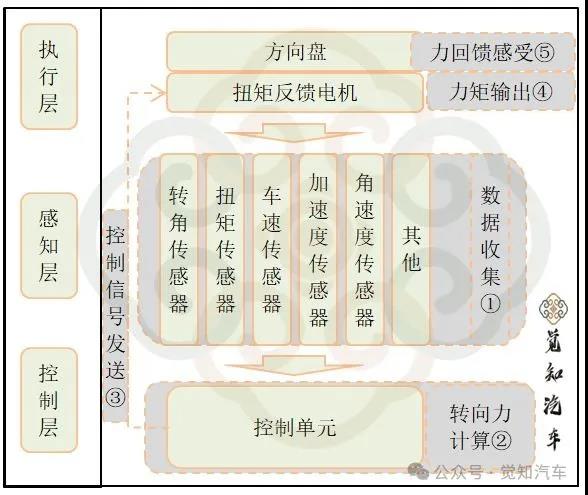
圖4 路感模擬過程示意
注:為使得路感模擬更真實(shí),對于所采集的數(shù)據(jù)需具有高精度、高準(zhǔn)確性、高實(shí)時的特性,通過此數(shù)據(jù)的應(yīng)用,結(jié)合詳細(xì)的車輛動力學(xué)模型及相關(guān)算法,實(shí)現(xiàn)轉(zhuǎn)向力矩的計(jì)算。并通過精確控制電機(jī)輸出的力矩大小和方向,確保能夠快速、準(zhǔn)確地響應(yīng)控制單元的指令,從而傳達(dá)給駕駛員恰如其分的力感。
五、安全冗余設(shè)計(jì)
由于SBW運(yùn)行的穩(wěn)定性直接關(guān)系到車輛的操控安全性和自動駕駛系統(tǒng)的可靠性,因此安全冗余設(shè)計(jì)在此處將會極其重要。通常,在此領(lǐng)域的做法是采用系統(tǒng)冗余方案,既采用多重傳感器備份、雙三重ECU架構(gòu)以及故障診斷和隔離功能等措施。
這里的“多重傳感器備份”意味著系統(tǒng)配備有不止一套傳感器系統(tǒng)來測量同樣的物理參數(shù)。這些傳感器通常是獨(dú)立工作且互為冗余,即使其中一套傳感器失效,其他傳感器仍能正常工作并提供準(zhǔn)確的數(shù)據(jù),確保系統(tǒng)能夠維持基本功能,避免因單一傳感器故障而導(dǎo)致的失控風(fēng)險。
“雙三重ECU架構(gòu)”指的是用于提高可靠性和安全性的高級冗余設(shè)計(jì)。其中,雙指至少有兩個完全獨(dú)立的電子控制單元,每一個都可以單獨(dú)處理所有的計(jì)算任務(wù);三重則是指在每個ECU內(nèi)部或者是在整個系統(tǒng)中有三個獨(dú)立的硬件或軟件通道,同樣執(zhí)行相同的控制邏輯。這種設(shè)計(jì)下,任何單點(diǎn)故障都不會導(dǎo)致系統(tǒng)完全失效,因?yàn)槠渌哂嗖糠挚梢粤⒓唇庸芷涔δ堋?/span>
故障診斷功能指的是系統(tǒng)具備自我檢測錯誤的能力,能夠及時發(fā)現(xiàn)硬件故障、軟件錯誤或其他異常情況。隔離功能則是指當(dāng)檢測到某個組件或子系統(tǒng)發(fā)生故障時,系統(tǒng)能夠自動切斷問題區(qū)域與整體系統(tǒng)之間的聯(lián)系,防止故障進(jìn)一步擴(kuò)散影響到其他正常工作的部分,同時激活備用系統(tǒng)或進(jìn)入安全模式,確保車輛在遇到故障時仍然保持一定的可控性。例如,若某一傳感器數(shù)據(jù)異常,則系統(tǒng)可能會忽略該傳感器數(shù)據(jù),轉(zhuǎn)而依賴其他正常工作的傳感器信息,從而確保車輛穩(wěn)定運(yùn)行。
然而,過度增加硬件冗余卻會顯著增加系統(tǒng)成本,這對于商業(yè)化和規(guī)模化將不是很好的解決方式。因此,對于傳感器和控制單元的冗余,通常會采取局部冗余或功能冗余策略去平衡,如:
選擇性冗余:只針對最關(guān)鍵且可能導(dǎo)致重大安全風(fēng)險的部件采用冗余設(shè)計(jì),例如轉(zhuǎn)向角度傳感器、扭矩傳感器這些更重要的感知器件;
軟件冗余與功能多樣性:通過軟件冗余設(shè)計(jì),實(shí)現(xiàn)故障檢測、隔離和恢復(fù),并結(jié)合跨系統(tǒng)冗余,如多個子系統(tǒng)共享信息以提高冗余度;
多層次冗余:在系統(tǒng)層級設(shè)計(jì)中,實(shí)現(xiàn)硬件、軟件和通訊的多重冗余或主/備控制單元之間配合實(shí)現(xiàn)不同級別的冗余;
可重構(gòu)系統(tǒng):設(shè)計(jì)可重構(gòu)的硬件和軟件架構(gòu),使得在系統(tǒng)某部分失效時,剩余部分可以重新配置以替代失效部件的功能。
同時,基于ISO 26262等功能安全標(biāo)準(zhǔn)的系統(tǒng)設(shè)計(jì),可確保在不大幅增加成本的前提下提高系統(tǒng)的整體安全水平。
六、總結(jié)
盡管SBW的車載應(yīng)用尚存需面對安全性、技術(shù)復(fù)雜性、成本、法規(guī)等諸多方面的壓力,同時也基于高階自動駕駛技術(shù)的尚未普及,從而讓該產(chǎn)品的滲透率難以提升。但從長遠(yuǎn)來看,隨著自動駕駛技術(shù)的發(fā)展,尤其是L4/L5級自動駕駛車輛的推進(jìn),SBW憑借其高響應(yīng)、高靈活等特性,在適應(yīng)自動駕駛方面將作為關(guān)鍵的線控技術(shù)被得到更廣泛的應(yīng)用。
同時,隨著相關(guān)技術(shù)的進(jìn)步,傳感器、控制器和執(zhí)行器的成本或有望逐漸降低,而SBW作為線控底盤的一部分,將有利于整合其他線控技術(shù)(如線控制動等),進(jìn)而實(shí)現(xiàn)車輛整體性能的優(yōu)化和智能化的升級。
轉(zhuǎn)自覺知汽車
