
新能源汽車電機控制器的性能邊界是指電機控制器在保證安全、可靠和高效運行的前提下,能夠承受的最大工作條件范圍。電機控制器的設(shè)計和制造需要綜合考慮性能邊界,以滿足新能源汽車的應(yīng)用需求。
新能源汽車的動力傳遞路徑相對簡單,因為它省去了傳統(tǒng)燃油車復(fù)雜的內(nèi)燃機和多級變速器系統(tǒng)。在純電動汽車(BEV)或插電式混合動力汽車(PHEV)中,牽引力的傳遞路徑通常如下:
電機->減速器->輪胎->整車

1、電機(Electric Motor):
電機是新能源汽車的核心部件之一,它將電能轉(zhuǎn)換為機械能,產(chǎn)生驅(qū)動車輪所需的扭矩。電機的轉(zhuǎn)速和扭矩可以通過電機控制器(Motor Controller)進行精確控制。
2、減速器(Reducer/Transmission):
2.1、在一些設(shè)計中,電機直接與一個單級減速器相連,減速器的作用是降低電機的高速轉(zhuǎn)動至車輪所需的低速轉(zhuǎn)動,同時增加扭矩。
2.2、對于配備多擋變速器的新能源汽車,電機先連接到變速器,變速器可以根據(jù)不同的駕駛條件提供不同的齒輪比,優(yōu)化車輛的動力輸出和效率。
3、輪胎(Wheels/Tires):
經(jīng)過減速器或變速器傳遞的扭矩最終通過車輪的輪胎轉(zhuǎn)化為牽引力,輪胎與地面接觸并推動或制動車輛。
4、整車(Vehicle):
輪胎與地面之間的摩擦力將牽引力傳遞給整車,推動車輛前進或后退。車輛的懸掛系統(tǒng)、車架和車身結(jié)構(gòu)等都會對牽引力的傳遞和車輛的動態(tài)響應(yīng)產(chǎn)生影響。
在新能源汽車中,電機通常與車輪之間只有簡單的機械連接,這有助于提高傳動效率并減少能量損失。此外,現(xiàn)代新能源汽車還可能配備有能量回收系統(tǒng),在制動或減速時將動能轉(zhuǎn)換回電能,存儲在電池中,從而提高整體的能源利用效率。
在新能源汽車的傳動系統(tǒng)中,電機輸出的轉(zhuǎn)速和扭矩通過減速器傳遞給車輪,從而影響整車的車速和牽引力。

減速器(或變速器)在這里起到了非常關(guān)鍵的作用,它主要通過齒輪變比來實現(xiàn)轉(zhuǎn)速和扭矩的轉(zhuǎn)換。以下是這一過程的詳細解釋:
1、電機轉(zhuǎn)速和扭矩:
電機可以在較高的轉(zhuǎn)速下運行,并產(chǎn)生扭矩。電機的轉(zhuǎn)速與扭矩特性通常受到其設(shè)計和控制策略的影響。
2、減速器的作用:
2.1、降速增扭:
減速器通過齒輪組降低電機的轉(zhuǎn)速,同時增加傳遞到車輪的扭矩。這是通過齒輪的變比來實現(xiàn)的,即小齒輪的轉(zhuǎn)速高于大齒輪,而小齒輪的扭矩低于大齒輪的扭矩。
2.2、適應(yīng)車輪需求:
車輪需要較低的轉(zhuǎn)速和較高的扭矩來有效推動車輛前進,減速器正好滿足了這一需求。
3、齒輪變比:
齒輪變比是指輸入齒輪(與電機連接)的轉(zhuǎn)速與輸出齒輪(與車輪連接)的轉(zhuǎn)速之間的比例。減速器的變比決定了電機轉(zhuǎn)速降低的倍數(shù)和扭矩增加的倍數(shù)。
4、整車車速:
整車車速與車輪的轉(zhuǎn)速成正比。由于減速器降低了電機轉(zhuǎn)速,車輪的轉(zhuǎn)速也會相應(yīng)降低,但車輪的扭矩增加,這有助于車輛加速和爬坡。
5、牽引力:
牽引力是車輪與地面之間的摩擦力,它取決于車輪的扭矩。減速器增加的扭矩可以轉(zhuǎn)化為更大的牽引力,從而提高車輛的加速性能和爬坡能力。
6、多擋減速器:
一些新能源汽車采用多擋減速器,它可以根據(jù)駕駛條件在不同的齒輪變比之間切換,以優(yōu)化車輛在不同速度下的性能和效率。
通過減速器的齒輪變比轉(zhuǎn)換,電機的高速低扭矩輸出可以被轉(zhuǎn)換為車輪所需的低速高扭矩,從而有效驅(qū)動車輛。
這種轉(zhuǎn)換對于確保新能源汽車具有良好的動力性能和經(jīng)濟性能至關(guān)重要。
1、電機轉(zhuǎn)速與車速的關(guān)系:
公式 Vvehicle=nmotor /igear*2πr*60/1000 表示了電機轉(zhuǎn)速 nmotor(單位:RPM,每分鐘轉(zhuǎn)數(shù))通過減速器變比 igear 轉(zhuǎn)換為輪胎轉(zhuǎn)速,再乘以輪胎的轉(zhuǎn)動周長 2πr(r單位:米),得到輪胎在一分鐘內(nèi)轉(zhuǎn)動的距離(單位:米),然后轉(zhuǎn)換為公里/小時(km/h)。
2、電機扭矩與牽引力的關(guān)系:
公式 Fvehicle=Tmotor?igear?η/r 表示了電機扭矩 Tmotor(單位:牛頓米,Nm)通過減速器變比 igear 放大,再除以輪胎滾動半徑 r(單位:米),乘以傳動效率 η,得到車輛的牽引力 Fvehicle(單位:牛頓,N)。
3、單位換算:
1千米(公里)= 1,000米(公尺)
1米(公尺)= 100厘米(公分)
1米(公尺)= 1,000毫米(公厘)
4、減速器變比:
減速器的變比 igear 是輸入轉(zhuǎn)速與輸出轉(zhuǎn)速之間的比值。在新能源汽車中,減速器通常具有固定的變比,以確保電機產(chǎn)生的扭矩能夠有效地傳遞到車輪。
5、2檔減速器的優(yōu)勢:
2檔減速器可以提供兩個不同的變比,允許車輛在不同的駕駛條件下選擇最合適的變比,從而優(yōu)化電機的工作效率。
在低速行駛時,可以使用較大的變比以提供更大的扭矩,有助于加速和爬坡。
在高速行駛時,可以使用較小的變比以降低電機轉(zhuǎn)速,提高電機和整個驅(qū)動系統(tǒng)的效率,同時可能提升最高車速。
6、輪胎滾動半徑標(biāo)準(zhǔn):
輪胎滾動半徑r是車輛動力學(xué)和牽引力計算中的一個重要參數(shù),其標(biāo)準(zhǔn)由GB/T2978-2014 提供。
通過這些關(guān)系,我們可以更好地理解新能源汽車動力傳動系統(tǒng)的工作原理,以及如何通過選擇合適的減速器變比來優(yōu)化車輛的性能。
當(dāng)前新能源汽車減速器一般為固定減速比的單擋減速器,2檔減速器也在研發(fā)過程中,2檔減速器的優(yōu)勢之一,通過改變變比,來提高電機輸出效率,在低速大扭矩或者高速小扭矩時,電機效率往往不高,而在中間區(qū)域,電機效率較高。
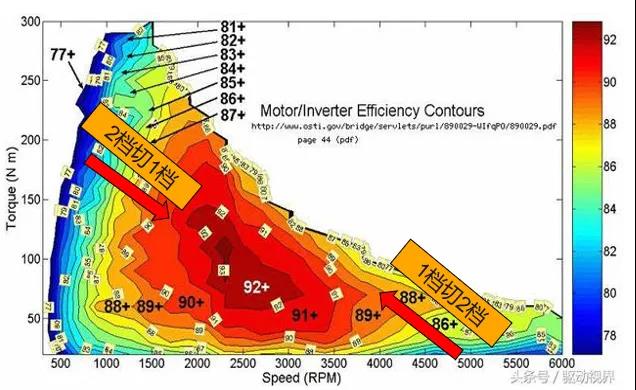
(假設(shè)單檔減速器 igear=10,兩檔減速器 igear1=14, igear2=5)
在低速大扭矩時,通過變比,2檔切換到1檔,在同樣的車速下,電驅(qū)動系統(tǒng)的轉(zhuǎn)速提升,扭矩下降,這樣就實現(xiàn)了從低速區(qū)域到高速區(qū)域的遷移。
在高速小扭矩時,通過變比,1檔切換到2檔,在相同車速下,電驅(qū)動系統(tǒng)的轉(zhuǎn)速下降,扭矩提升,這樣就實現(xiàn)了從高速區(qū)域到低速區(qū)域的遷移。
電動汽車采用2檔減速器(也稱為2檔變速器)是一種提升車輛性能和效率的技術(shù)方案。
對于一輛汽車往往是在平面上行駛,但是在爬坡過程中,受到的力會比平面上要復(fù)雜一些。
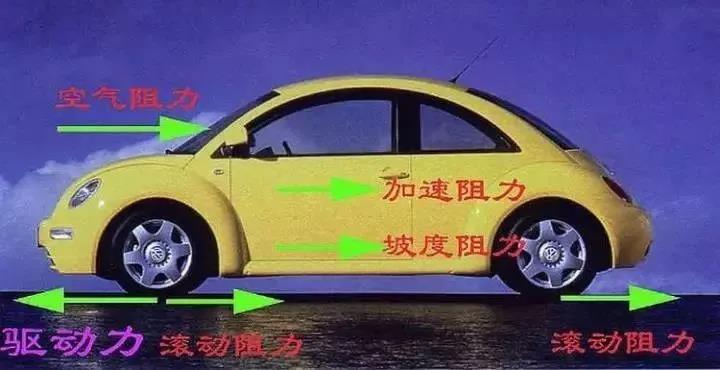

加速階段阻力計算公式:Ft=Fs+Ff+Fw+Fj
坡道阻力:Fs=mgsina
滾動阻力:Ff=mgfcosa
空氣阻力:Fw=0.5ρACdV2
加速阻力:Fj=mδdv/dt
當(dāng)牽引力大于加速階段阻力時,車輛具有加速能力;當(dāng)牽引力小于加速階段阻力時,車輛車速就會往下降;
以下是對這些力的詳細解釋和公式:
加速階段阻力Ft:這是汽車在加速時所遇到的全部阻力,包括坡道阻力、滾動阻力、空氣阻力和加速阻力。
坡道阻力Fs:Fs=m?g?sin(α) 其中:
- m是汽車的質(zhì)量
- g是重力加速度(約9.81?m/ s2 )
- α是坡道的角度
- sin(α)是坡道角度的正弦值,表示坡度的陡峭程度。
滾動阻力Ff:Ff=m?g?f?cos(α) 其中:
- f是滾動阻力系數(shù),它取決于輪胎的類型和路面條件.
- cos(α)是坡道角度的余弦值,用于計算在垂直于坡道方向上的分力。
空氣阻力Fw:Fw=0.5?ρ?A?Cd?V2 其中:
- ρ是空氣密度, 若在地球大氣層中,空氣密度可以用壓高公式計算. 在0°C,一大氣壓條件下密度為1.293kg/m3
- A是汽車在運動方向上的正面投影面積參考面積.
- Cd是空氣阻力系數(shù), 是一個無量綱的系數(shù),像汽車的阻力系數(shù)約在0.25到0.45之間.
- V是汽車相對于空氣的速度。
加速阻力Fj:Fj=m?δ?dv/dt 其中:
- δ是一個表示阻力大小的系數(shù),可能依賴于車輛的速度或其他因素.
- dv/dt是速度相對于時間的變化率,即加速度。
當(dāng)牽引力(由發(fā)動機或電動機提供)大于加速階段阻力時,汽車將加速。牽引力可以表示為:
Ftraction=T 其中 T是牽引力。
牽引力必須克服上述所有阻力,才能使汽車加速。如果牽引力等于或小于阻力,汽車將無法維持當(dāng)前的加速度,甚至可能減速。
在實際應(yīng)用中,車輛的加速度 a 可以表示為:a=(Ftraction?Ft)/m
如果 a>0,則車輛加速;如果 a<0,則車輛減速。
在設(shè)計和分析汽車性能時,這些力的計算對于確定所需的最小發(fā)動機功率、選擇合適的傳動比、優(yōu)化車輛的空氣動力學(xué)設(shè)計以及評估車輛在不同路況下的性能都是非常重要的。
通過這些基本的動力學(xué)計算公式,可以推導(dǎo)出整車的諸如:百公里加速、最高車速、爬坡度等外特性指標(biāo)。
如下圖所示,汽車行駛驅(qū)動力以及阻力和車速的關(guān)系:
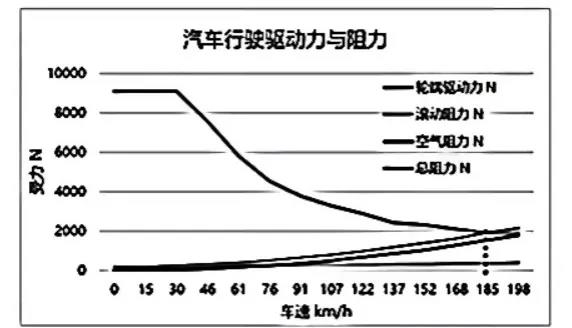
該圖展示了在不同車速下,輪端驅(qū)動力、滾動阻力、空氣阻力和總阻力的變化。每個力的大小隨車速的變化而變化,反映出汽車在不同速度下的動力學(xué)特性。
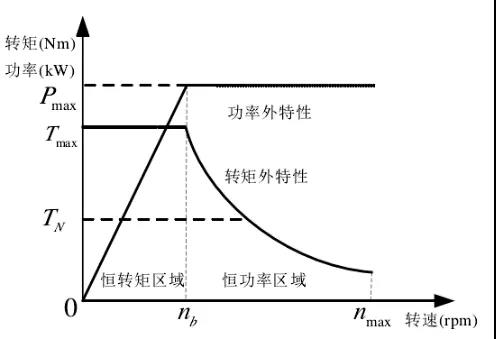
1、峰值外特性: 電動汽車的電動機通常設(shè)計成在較低轉(zhuǎn)速時就能輸出峰值扭矩,這使得電動汽車具有出色的起動加速性能。
2、牽引力與車速的關(guān)系: 電動汽車在起步時,由于電機可以立即輸出峰值扭矩,因此加速迅猛。然而,隨著車速的增加,電機的輸出扭矩會根據(jù)其扭矩-速度特性曲線而下降。這是因為電機的功率輸出是有限的,為了保持功率恒定,當(dāng)轉(zhuǎn)速增加時,扭矩必須減少。
3、阻力與車速的關(guān)系: 車輛在行駛過程中受到的阻力,如滾動阻力和空氣阻力,會隨著車速的增加而增加。滾動阻力大致與車速無關(guān),而空氣阻力則與車速的平方成正比。
4、最高車速的確定: 最高車速是牽引力和阻力達到平衡時的速度(圖中為185km/h)。在這個速度下,電機提供的牽引力剛好等于車輛需要克服的所有阻力。超過這個速度,車輛將沒有足夠的額外牽引力來克服阻力的增加,因此無法繼續(xù)加速。
5、計算最高車速: 要計算最高車速,需要知道車輛的氣動特性、滾動阻力系數(shù)、車輛質(zhì)量、以及電機和傳動系統(tǒng)的外特性。通過這些信息,可以確定在不同車速下所需的牽引力,并找到牽引力等于阻力時的速度。
如下圖所示,表明不同油門開度下的車輛加速度:
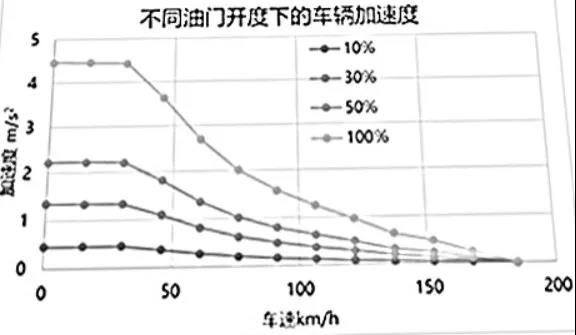
該圖展示了在不同油門開度(10%,30%,50%,100%)下,車速從0 km/h 增加到185 km/h 時的加速度變化。每個數(shù)據(jù)點代表特定車速和油門開度下的加速度值。這個圖表可以幫助理解不同駕駛條件下車輛的加速性能。
對于自動擋新能源汽車,油門踏板和制動踏板是控制車輛行駛的兩個主要輸入。新能源汽車的駕駛體驗是由多個因素共同決定的,其中包括電驅(qū)動系統(tǒng)的設(shè)計、整車的動力學(xué)特性、以及油門踏板和制動踏板的標(biāo)定。
1、踏板位置與牽引力的關(guān)系: 在自動擋新能源汽車中,油門踏板的位置(即踩下去的深度或行程)直接影響電機的輸出功率和扭矩。當(dāng)駕駛員完全踩下油門踏板時,電機通常會輸出其峰值扭矩,從而提供最大的牽引力。而當(dāng)油門踏板只踩一半時,電機輸出的扭矩會相應(yīng)減少,牽引力也會降低。
2、牽引力和制動力的產(chǎn)生: 牽引力是由電機產(chǎn)生的,通過傳動系統(tǒng)傳遞到車輪。制動力則可能來自機械制動系統(tǒng)(如剎車盤和剎車卡鉗)和電機的再生制動功能。在新能源汽車中,再生制動可以在減速或下坡行駛時將動能轉(zhuǎn)換回電能,同時提供制動力。
3、整車牽引力和制動力的標(biāo)定: 整車牽引力和制動力的大小通常需要通過標(biāo)定來調(diào)整,以確保車輛的駕駛性能符合設(shè)計要求和消費者的期望。標(biāo)定過程涉及對電驅(qū)動系統(tǒng)的控制策略進行調(diào)整,包括油門響應(yīng)曲線、再生制動力度、以及動力輸出與車速的關(guān)系等。
4、加速度需求的確定: 在整車開發(fā)之前,工程師會根據(jù)車輛的基本參數(shù)(如整車質(zhì)量、預(yù)期加速度等)和性能目標(biāo)(如最高車速、百公里加速時間等)來確定所需的加速度能力。這些需求可以通過仿真得到,也可以參考競品車的實車標(biāo)定數(shù)據(jù)。
5、加速能力曲線: 根據(jù)加速度需求,可以繪制出在不同車速和油門踏板開度下的加速能力曲線。這條曲線反映了車輛在特定條件下所需的動力輸出,是電機外特性曲線和整車動力學(xué)特性的綜合體現(xiàn)。
6、駕駛性感受: 整車的駕駛性感受不僅取決于電驅(qū)動系統(tǒng)的性能,還受到標(biāo)定過程的影響。標(biāo)定值的選擇會影響車輛的響應(yīng)速度、加速性能和駕駛舒適性。例如,如果在某車速和油門開度下的標(biāo)定值較大,車輛的加速響應(yīng)會更迅速,給駕駛員帶來更“勁爆”的駕駛體驗;而如果標(biāo)定值較小,則車輛的駕駛會更平穩(wěn)舒適。
總之,新能源汽車的標(biāo)定是一個復(fù)雜的過程,需要綜合考慮車輛的性能目標(biāo)、消費者的駕駛習(xí)慣和期望,以及車輛的動力學(xué)特性。通過精確的標(biāo)定,可以優(yōu)化車輛的駕駛性能,提供更好的駕駛體驗。
轉(zhuǎn)自汽車電子與軟件
