
3.1 行車場景應(yīng)用趨勢
1)前視一體機市場需求持續(xù)增大
據(jù)相關(guān)機構(gòu)數(shù)據(jù)顯示,2022年中國乘用車市場(不含進口車型)裝配AEB的車型銷量達到948.5萬輛,同比增長21.4%,裝配率也從2021年的38.5%提升到47.7%。
從車型價位分布來看,AEB的配裝率與車輛價格呈正相關(guān)。在國內(nèi)乘用車市場,35萬元以上的價位車型AEB的裝配率已經(jīng)超過90%;而10萬~15萬的主銷車型AEB的裝配率卻只有35%,10萬元以下的車型AEB的裝配率僅有2.27%。
圖表23. 2022年國內(nèi)乘用車不同價位區(qū)間車型AEB的裝配率情況
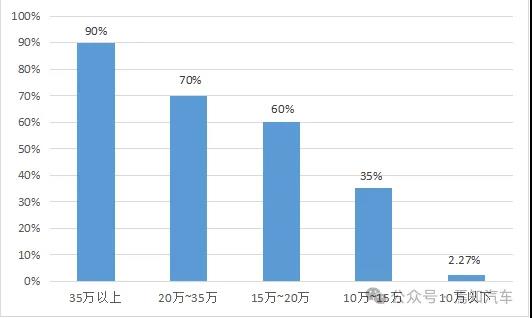
數(shù)據(jù)來源:高工智能汽車研究院 、焉知汽車整理
AEB具體實現(xiàn)方案主要包括單雷達、單視覺、雷達+視覺三大類型,其中,基于前視一體機(1V)以及前視一體機+前置雷達的融合方案(1V1R)是比較主流的實現(xiàn)方式。AEB滲透率的不斷提升推動了前視一體機市場需求的持續(xù)增大。
- 政策法規(guī)驅(qū)動AEB滲透率不斷提升
全球主要國家地區(qū)AEB相關(guān)法規(guī)政策的持續(xù)推進,在一定程度上提升了前視一體機的市場需求空間。
圖表24. 全球主要國家AEB相關(guān)法規(guī)政策情況
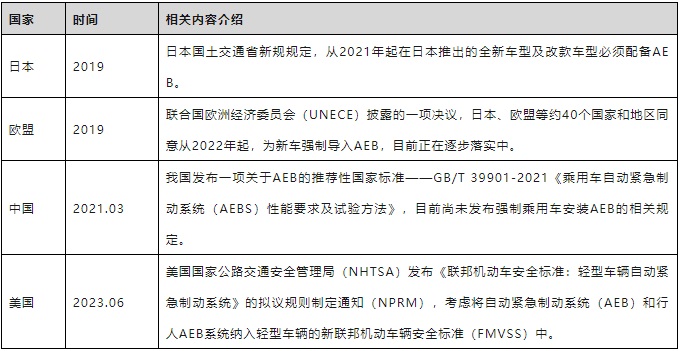
信息來源:公開資料整理
另外,歐盟的E-NCAP、美國的IIHS以及中國的C-NCAP評價測試中也在不斷增強AEB相關(guān)測試的場景內(nèi)容。
圖表25. AEB評價內(nèi)容變化點

信息來源:NHTSA E-NCAP、C-NCAP、焉知汽車整理
如果車輛要出口到歐盟或北美等法規(guī)比較嚴(yán)苛的地區(qū),前視攝像頭基本是必選項。如果不使用前視一體機方案,那就只有選擇域控制器方案,但這樣又增加了成本。因此,一些對成本敏感度比較高的出口車型,不得不選擇前視一體機方案。
同時,因AEB法規(guī)場景的測試要求越來越高,對于攝像頭的分辨率要求也在提高。據(jù)業(yè)內(nèi)人士透露,2MP的前視一體機基本滿足不了E-NCAP 5星的得分率要求,至少需要搭載分辨率在5MP以上的前視一體機。
- 高性價比進一步推動了前視一體機市場增速
與前視一體機搭配的解決方案通常有以下幾種:1V、1V1R、1V3R 、1V5R等。對于實現(xiàn)L2及以下的輔助駕駛功能,通過單目前視一體機搭配不同數(shù)量的毫米波雷達,依然是性價比比較高的方案。
雖然,當(dāng)前基于單J3、單TDA4VM、單A1000L/A1000、J3+TDA4VM,以及雙TDA4VM 等各種形式輕量級行泊一體域控系統(tǒng)在不斷地落地應(yīng)用,但短時間內(nèi)他們在成本上依然不具備優(yōu)勢。
現(xiàn)階段,2MP前視一體機價位大概在500~600元左右,8MP前視一體機價位大概在800元左右。對于輕量級的行泊一體域控方案,即便成本控制的再好,單域控硬件成本的價格也在千元級別,再加上外圍感知傳感器,總硬件成本會更高。因此對于一些車企來講,中高端車型可能會選用行泊一體域控制器方案,對于走量的中低端車型還是傾向于采用前視一體機的方案配置。
2)前視應(yīng)用 - 三目方案或?qū)⑼顺鰵v史舞臺
受攝像頭CMOS圖像傳感器分辨率限制,最開始,在一些高階智能駕駛系統(tǒng)方案中,為了能夠充分覆蓋前向的視野范圍,不少車型采用了三目方案。但是在國內(nèi)主流車企的最新平臺車型中,前視方案中基本都采用了2顆高分辨率的攝像頭,甚至有的只用了1顆8MP攝像頭。這既有攝像頭分辨率提升的因素,也有成本層面的考量。
圖表26. 不同品牌車型平臺前視攝像頭的應(yīng)用情況

信息來源:公開資料整理
三目攝像頭的主要應(yīng)用情況如下:
-
長距離窄視角攝像頭(28°~30°):主要用于前向遠距離目標(biāo)的識別和探測,比如遠距離交通標(biāo)志識別、紅綠燈狀態(tài)識別、前方道路施工預(yù)警等。
-
中距離主視角攝像頭(50°~52°):主要用于前向中遠距離目標(biāo)的識別和探測。
-
短距離廣視角攝像頭(100°~120°):主要用于及時識別近距離車輛加塞、十字路口橫穿車輛/行人等。
圖表27. 特斯拉HW3.0系統(tǒng)三目攝像頭結(jié)構(gòu)示意圖

信息來源:Automotive Teardown Track. System Plus Consulting 2020
據(jù)業(yè)內(nèi)人士透露,如果是用于支持L2及以下的輔助駕駛功能,1個8MP前視攝像頭基本夠用:水平FOV110°~120°,車輛有效探測距離大概在200m以上。
但對于實現(xiàn)高階智能駕駛功能,比如城市NOA,前視攝像頭不僅需要能夠識別較遠距離的紅綠燈、減速帶等,還需要在十字路口等復(fù)雜場景中,能夠探測到相鄰車道車輛或非機動車的運動情況,因此需要采用不同視場角的3顆攝像頭進行探測距離和寬度上的互補,以擴大前向探測的廣度和深度。
隨著高清分辨率圖像傳感器的量產(chǎn)應(yīng)用,單個高清攝像頭在同樣的視角情況下,便可以覆蓋更遠的距離。比如,索尼IMX490(5.43MP像素),即使使用單個H-FOV50°攝像頭,其有效覆蓋范圍也遠超過2個1.2MP像素(H-FOV35°+H-FOV50°)的攝像頭組合。因此,對于之前的三目攝像頭方案,可以直接去掉長焦攝像頭,只使用中焦和廣角兩個高分辨率攝像頭即可。
3)前視/側(cè)視攝像頭模組去“ISP”化
整車EE架構(gòu)在不斷地迭代升級,現(xiàn)在已經(jīng)由分布式ECU架構(gòu)進入到集中式域控制器架構(gòu)時代,并逐步向中央集成式架構(gòu)邁進。
在集中式域控制器架構(gòu)下,DCU控制單元中的主控SoC芯片一般都直接帶有ISP模塊,可以支持多個攝像頭RAW Date數(shù)據(jù)的處理,來幫助攝像頭模組“減負”。因此,攝像頭模組本身便可以無需安裝ISP,只作為信息采集的硬件設(shè)備即可。這樣不僅可以降低整個系統(tǒng)的硬件成本,也解決了攝像頭高清化所帶來的散熱問題;同時,也符合攝像頭小型化和輕量化的發(fā)展趨勢。
另外,應(yīng)用算法最終是要在域控制器里運行,算法能達到什么樣的效果,其實域控廠商最了解。把ISP放置到域控制器端,也便于域控廠商自己去做ISP調(diào)試,這樣更容易充分發(fā)揮出算法能力。
因此,應(yīng)用在行車ADAS中的前視、周視攝像頭,通常不帶ISP模塊。但環(huán)視攝像頭中的CMOS圖像傳感器一般會集成ISP模塊。目前環(huán)視攝像頭大多還是直接接入到車機去做360°成像顯示,如果攝像頭模組廠商直接把ISP調(diào)試好,做成標(biāo)準(zhǔn)產(chǎn)品交付,會幫助主機廠或解決方案商在開發(fā)過程中避免復(fù)雜的ISP調(diào)優(yōu)過程。
畢竟,車載攝像頭ISP的調(diào)試具有比較大的技術(shù)門檻,多數(shù)Tier1、芯片廠商以及主機廠并不具備ISP的調(diào)試能力。同樣,ISP的調(diào)試也是一項非常消耗人力資源的事情,即便是主機廠具備這樣的能力,除非是一些重要項目,否則也會盡量避免自己去做調(diào)試。
4)側(cè)視應(yīng)用 - 超級魚眼攝像頭代替?zhèn)鹘y(tǒng)側(cè)視攝像頭+環(huán)視攝像頭
隨著智能駕駛功能的不斷迭代升級,現(xiàn)在智能汽車上所配置的攝像頭的數(shù)量越來越多,通常達到9V~12V的水平。更多的攝像頭雖然可以覆蓋到更多的場景,但對系統(tǒng)成本以及整個系統(tǒng)的可靠性而言,也會帶來不小的挑戰(zhàn)。畢竟傳感器數(shù)量越多,整個系統(tǒng)失效的概率也會變大。
那么,是否能夠?qū)@些攝像頭進行精簡整合呢?華為曾在2021年上海車展上展出其正在研發(fā)的超級魚眼攝像頭,據(jù)介紹,該攝像頭可以同時兼顧較大的FOV和長達80m的探測距離,可以用4個超級魚眼攝像頭替代傳統(tǒng)側(cè)視和環(huán)視共8個攝像頭。
焉知汽車認(rèn)為,只要超級魚眼攝像頭性能能夠達到要求,從性價比角度來看,它是一種比較可取的方案,并符合當(dāng)下企業(yè)追求性價比的趨勢。據(jù)相關(guān)人士透露,目前已有不少企業(yè)在布局這樣的方案。
對于這樣的方案可能還會存在以下顧慮:
- 超級魚眼攝像頭在具備較大的FOV情況下,是否還能兼顧較遠的探測距離?
- 通過之前傳感器方案采集并標(biāo)注的數(shù)據(jù),現(xiàn)在還有多少能復(fù)用?
- 超級魚眼攝像頭作為側(cè)視攝像頭做遠距離物體探測的時候,是否會因為畸變而存在一些問題?
- 車載攝像頭通常都是定焦方案,超級魚眼攝像頭是否會考慮做成變焦方案?
3.2 泊車場景應(yīng)用趨勢
1)環(huán)視系統(tǒng)的“控制權(quán)”會轉(zhuǎn)移到座艙或智駕域控
當(dāng)前,環(huán)視攝像頭主要有以下幾種控制形式:
- 不帶APA功能,只有AVM功能,環(huán)視攝像頭直接接入到車機來控制;
- 帶APA和AVM功能,環(huán)視攝像頭直接接入到獨立的泊車控制器里去控制;
- 帶APA和AVM功能,并且配置有座艙域控制器,環(huán)視攝像頭接入到座艙域控制器來控制;
- 除了帶APA和AVM功能外,還帶有HPA以及AVP等功能安全要求比較高的泊車功能,則環(huán)視攝像頭接入到智能駕駛域控制器來控制。
對僅有360環(huán)視功能的中低端車型,4顆環(huán)視攝像頭一般會直接接入到車機系統(tǒng)。如果主機廠原先的一些舊車型平臺,是由獨立泊車控制器形式來實現(xiàn)APA和AVM功能,那么,為了保證開發(fā)成本可控,原平臺上車型基本會繼續(xù)沿用舊方案。但從長期來看,獨立的泊車控制器的形式會消失,360環(huán)視攝像頭會直接接入到座艙域控或智能駕駛域控。
總的來講,把環(huán)視攝像頭接入到座艙域控制器,還是接入到智駕域控制器,應(yīng)用目的不太一樣 —— 接入到座艙,會更側(cè)重360環(huán)視在人機界面的直觀體驗;接入到智駕域控制器,360環(huán)視系統(tǒng)需要跟行車ADAS相關(guān)功能進行聯(lián)動,會更強調(diào)功能的安全性和可靠性。
2)基于360°環(huán)視攝像頭進行感知功能拓展
之前的“價格戰(zhàn)”讓車企對成本更加地“斤斤計較”。對于供應(yīng)商而言,如果產(chǎn)品沒有較高的性價比,他們就很難打入到車企的供應(yīng)鏈體系。
如何提高性價比,有一個比較常規(guī)的做法便是“加量不加價”,即一套解決方案在不提高成本的情況下,為車企提供盡可能多的功能體驗,為車型增加宣傳賣點。
對于泊車場景下的360環(huán)視功能也是如此,如何在原有硬件方案的基礎(chǔ)上,對環(huán)視系統(tǒng)做一些感知功能方面的延伸,通過調(diào)整軟件去增加更多實用性的功能是現(xiàn)在很多環(huán)視系統(tǒng)方案解決商一直在思考的問題。
目前,大家正在做的一些嘗試,包括增加透明底盤、移動物體監(jiān)測和預(yù)警(MOD)、車道偏離預(yù)警(LDW)、行車記錄儀(DVR)、視覺開門提醒(DOW)等功能。
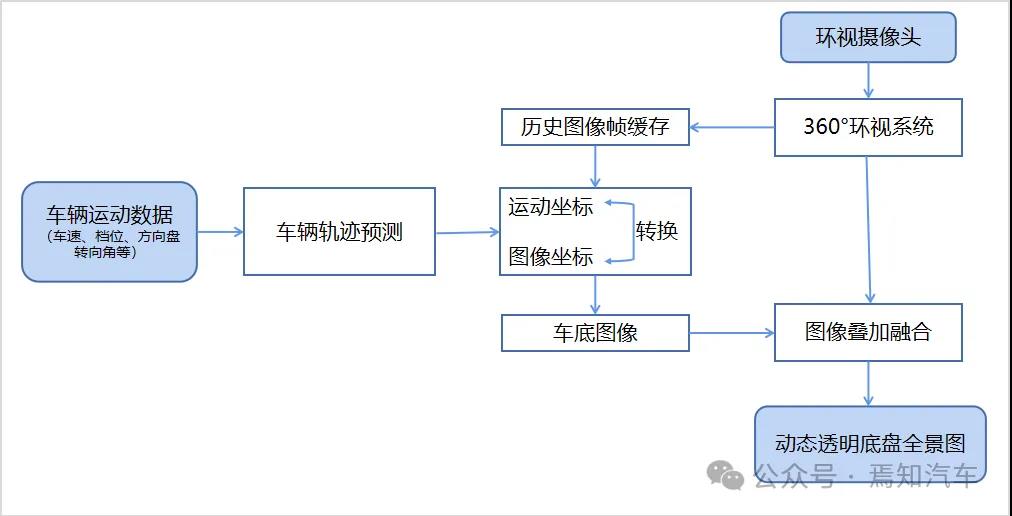
透明底盤:通過環(huán)視攝像頭將拍攝到的圖像進行拼接合成并保存歷史幀圖像。系統(tǒng)將根據(jù)車輛運動的數(shù)據(jù)(車速、檔位、轉(zhuǎn)向角等)預(yù)估車輛的行駛軌跡。參考車輛的行駛軌跡,并以車輛運動坐標(biāo)代替圖像坐標(biāo),調(diào)取與當(dāng)前車底位置相對應(yīng)的歷史幀圖像,并與實時的車輛外部圖像進行疊加拼合,最終呈現(xiàn)出動態(tài)透明底盤的效果,并輸出顯示到艙內(nèi)的顯示屏上。
該功能的主要作用是讓駕駛員能夠看清輪胎的位置以及車底路面狀況,及時讓車輛避開井蓋、坑洼、尖銳物體等,確保車輛在狹窄或崎嶇不平等復(fù)雜路況下低速通行的安全性。
圖表28. 透明底盤工作原理流程圖
車道偏離預(yù)警LDW:車道偏離預(yù)警功能通常是基于前視攝像頭來實現(xiàn)。但對于一些未配置前視攝像頭的車型,可通過環(huán)視攝像頭識別車道線來實現(xiàn)車道偏離預(yù)警功能,以提升車型的溢價能力。
移動物體監(jiān)測功能MOD:隨著攝像頭距離探測精度提升,一些中低端車型出于成本考慮“砍掉”超聲波雷達的情況下,完全可以用環(huán)視攝像頭來實現(xiàn)近距離的移動物體檢測功能。
車企是否希望在360環(huán)視功能的基礎(chǔ)上再去拓展一些新的功能,首先,會考慮整個系統(tǒng)成本會增加多少;其次,要看新增功能的實用性如何,是否能成為一個宣傳賣點。再一個也要看原車型硬件是否有足夠的算力去支持集成這些功能。總之,在原來360環(huán)視系統(tǒng)的基礎(chǔ)上做“加法”是一個必然的趨勢。
3)中短期內(nèi),3MP攝像頭或?qū)⒊蔀榄h(huán)視應(yīng)用的主流產(chǎn)品
目前,在環(huán)視攝像頭應(yīng)用市場,主流應(yīng)用還是1.2MP/1.3MP,同時2MP環(huán)視攝像頭也逐漸開始量產(chǎn)應(yīng)用。
現(xiàn)在,環(huán)視攝像頭的分辨率正在由1.2MP升級到2MP甚至是3MP。比較重要的一個原因是:座艙內(nèi)的中控顯示屏幕的尺寸越來越大,現(xiàn)在動輒就是13英寸甚至15英寸大屏。據(jù)業(yè)內(nèi)人士介紹,顯示屏幕變大以后,在光線不均勻的情況下,1.2MP攝像頭輸出圖像的周邊的噪點非常嚴(yán)重。2MP攝像頭輸出的圖像質(zhì)量會提升很多,3MP攝像頭的輸出顯示的圖像質(zhì)量效果更佳。
為什么說3MP環(huán)視攝像頭會直接成為中高端車型應(yīng)用趨勢呢?
因為在短期內(nèi),艙內(nèi)屏幕尺寸的大小幾乎不太可能發(fā)生較大的變化,攝像頭像素再往上增加,對于圖像顯示效果上的提升也變得有限。如果單純?yōu)榱藞D像顯示效果,目前來看,5MP或8MP環(huán)視攝像頭對屏幕顯示效果的加成作用已經(jīng)不大。
另外,也有價格方面的考量。目前2MP與3MP兩者價格相差很小,一旦3MP攝像頭的出貨量提上來,可能會比2MP攝像頭在價格上更具優(yōu)勢。
再者,3MP環(huán)視攝像頭更多地是應(yīng)用在中高端車型上,支持行泊一體功能。也就是說3MP環(huán)視攝像頭不僅用于近距離的物體成像和感知,還需要兼顧在行車場景下,更遠距離的目標(biāo)識別和和探測能力。據(jù)相關(guān)企業(yè)試驗評估,針對行車工況下目標(biāo)探測(比如20m以內(nèi)的車輛,15m以內(nèi)的行人),相比2MP環(huán)視攝像頭,3MP環(huán)視攝像頭的實現(xiàn)效果更佳。
那么,在行車場景下,5MP甚至8MP環(huán)視攝像頭的目標(biāo)探測能力會更強,這毋庸置疑。但5MP或8MP環(huán)視攝像頭在價格上是最大的障礙,短期內(nèi)還無法下降到跟2MP或3MP攝像頭相當(dāng)?shù)乃健?/span>
針對行車工況下的近距離目標(biāo)探測,3MP環(huán)視攝像頭已經(jīng)完全夠用。如果要作為超級魚眼攝像頭實現(xiàn)周視和側(cè)視的二合一,那么,這種情況下超級魚眼攝像頭也許會采用5MP甚至更高分辨率的8MP攝像頭。
4)隨著環(huán)視攝像頭的感知能力增強,超聲波雷達或?qū)⒈蝗∠?/span>
早期,泊車輔助功能是通過在后保險杠布置4顆超聲波雷達,作為倒車時的安全輔助裝置。緊接著攝像頭開始引入到車載領(lǐng)域,通常在后牌照板上方布置1顆倒車后視攝像頭,通過影像顯示來輔助泊車。再往后,倒車影像功能升級為由4顆環(huán)視攝像頭實現(xiàn)的360全景影像系統(tǒng),4顆倒車防撞超聲波雷達也升級為由12顆超聲波雷達來實現(xiàn)的半自動泊車(APA)功能。現(xiàn)在很多車型甚至都標(biāo)配了基于4顆環(huán)視攝像頭+12顆超聲波雷達去實現(xiàn)的視覺融合全自動泊車系統(tǒng)。
從泊車功能的發(fā)展歷程來看,環(huán)視攝像頭最開始主要是用于成像,通過把車身周邊的場景呈現(xiàn)給駕駛員去輔助其進行決策。現(xiàn)在環(huán)視攝像頭不僅用于成像,同時也發(fā)揮感知作用,用于目標(biāo)識別和探測。但測速和測距正是超聲波雷達所擅長,如果環(huán)視攝像頭測速和測距的精度能夠跟超聲波雷達媲美,是否意味著超聲波雷達就可以被“砍掉”?
實際上,超聲波雷達畢竟是一類性能穩(wěn)定可靠且性價比非常高的感知傳感器,短期內(nèi)不太可能被完全取消掉。在目前情況下,如果要做到極致安全,超聲波雷達還有其存在的價值:
- 超聲波雷達適合短距離的障礙物監(jiān)測,不需要特殊算法,非常適合應(yīng)用在小算力泊車產(chǎn)品。
- 在地下停車場,車往后倒的時候,如果后面是一堵沒任何紋理的墻,攝像頭還無法完全精準(zhǔn)識別和探測。如果加上超聲波雷達,則可以避免碰撞的發(fā)生。
- 相比環(huán)視攝像頭,超聲波雷達可以輸出高精度的點云信息(帶距離和方位)。比如,尋找停車位,超聲波雷達掃過后,有比較清晰的輪廓,置信度比較高。而通過攝像頭掃描車位的范圍還不夠大,并且置信度有限。另外,超聲波雷達在車位識別的正確率,特別是空間車位的識別上,具備一定的優(yōu)勢。
- 同一類傳感器做得再好,總歸還是有不足的地方,需要不同類型異構(gòu)傳感器之間進行互補。毫米波雷達在低速模式的精確度尚未達到一定水平的情況下,超聲波雷達依然是與環(huán)視攝像頭在低速場景下互補最合適的傳感器。
雖然,目前超聲波雷達的確具備存在的價值,但是從長期來看,超聲波雷達被取消掉也存在很大的可能性。
- 隨著攝像頭分辨率提升,以及算法能力的提升,在充足算力的域控制器計算平臺的支持下,環(huán)視攝像頭的測距和測速能力也會不斷提高。
- 從另外一個角度講,對于一些中高配車型,如果本身配備了角雷達(毫米波雷達),角雷達的存在也會給超聲波雷達帶來一定的威脅。毫米波雷達一般都有高低速模式,只不過現(xiàn)在毫米波雷達的低速模式下的探測精度(±3~4cm)尚未達到超聲波雷達的探測精度(±1cm)。
因此,隨著環(huán)視攝像頭測距和測速精度的提升,以及毫米波雷達在低速模式下探測精度的提高,超聲波雷達最終很有可能被取消掉。
3.3 艙內(nèi)場景應(yīng)用趨勢
攝像頭在座艙內(nèi)的應(yīng)用主要有DMS(駕駛員監(jiān)測系統(tǒng))和OMS(乘員監(jiān)測系統(tǒng)),通過攝像頭采集數(shù)據(jù),并利用深度學(xué)習(xí)算法對收集到的圖像/視頻數(shù)據(jù)進行處理,從而完成識別、檢測、分類等多樣任務(wù)。依托AI視覺技術(shù)的快速發(fā)展,基于紅外攝像頭的主動式感知方案已成為DMS和OMS的主流技術(shù)實現(xiàn)路徑。
1)DMS功能不斷拓展
DMS系統(tǒng)除了用于駕駛員狀態(tài)監(jiān)控外,還在不斷地進行功能升級和拓展,進而提升整個座艙的安全性和舒適性體驗。
- 基于Face-ID的定制化智能交互與服務(wù)
駕駛員進入駕駛位,系統(tǒng)自動啟動攝像頭并進行面部身份識別。如果是第一次用車,需要通過相關(guān)身份驗證,然后創(chuàng)建專屬的駕駛員ID,并設(shè)置自己的駕駛行為偏好。待下次駕駛時,通過系統(tǒng)身份認(rèn)證后,系統(tǒng)會根據(jù)駕駛員預(yù)設(shè)置好的偏好進行自動調(diào)節(jié),比如座椅位置、外后視鏡角度、播放曲目等。
- 通過更加智能的算法進行生理信號探測,提供更人性化和情感化的服務(wù)
隨著AI視覺算法的增強,攝像頭對人類面部動作的感知越來越精確,系統(tǒng)通過相關(guān)數(shù)據(jù)能夠準(zhǔn)確判斷出駕駛員的情緒,當(dāng)駕駛員情緒不佳的時候,智能聊天機器人能夠主動問候,以示關(guān)心。
另外,DMS攝像頭還能實現(xiàn)駕駛員健康分析,通過分析駕駛員面部血氧含量,可測量出心跳、壓力、呼吸等生物體征,并對駕駛員的健康狀態(tài)進行實時的監(jiān)測和提醒。
- DMS監(jiān)控范圍擴展,升級為IMS(座艙監(jiān)控系統(tǒng))
隨著軟件算法能力的提升以及AI視覺技術(shù)的發(fā)展,有些廠商在嘗試將DMS與OMS合并為一體式的座艙監(jiān)測系統(tǒng)(IMS),為座艙功能多樣化提供技術(shù)基礎(chǔ)。
可以基于一顆攝像頭同時去實現(xiàn)DMS和OMS功能,它通常布置在內(nèi)后視鏡處,兼顧駕駛員及前后排乘客,不僅可以實現(xiàn)駕駛員的危險行為、疲勞駕駛、分神駕駛等狀態(tài)監(jiān)測,同時,還能對艙內(nèi)乘客及相關(guān)物品進行實時感知和跟蹤監(jiān)測。
圖表29. 艙內(nèi)監(jiān)測系統(tǒng)方案

信息來源:歐菲光
2)DMS由獨立控制走向被集成
最開始,DMS通常使用獨立的控制單元。但隨著整車EE架構(gòu)的演進和AI芯片技術(shù)的發(fā)展,用于座艙或智駕域控的主控SoC芯片中一般都集成有豐富的異構(gòu)資源,比如基本都配置有圖像處理模塊-ISP和 AI處理單元-NPU,并且算力資源也有了富余,能夠支持多通道視頻的輸入和處理能力。
DMS功能跟智駕和座艙都有一定的相關(guān)性,被整合在哪個域也都存在一定的合理性。現(xiàn)在存在兩種不同的集成路線方案:DMS被集成到座艙域和DMS被集成到智駕域。
DMS融合到哪個域合適,可以參考以下幾點原則:
- 域控制器需有足夠富余的硬件資源支持它集成進來。
- 有成本優(yōu)勢:總成本降低或只增加有限的設(shè)計和開發(fā)成本,能夠提升產(chǎn)品的溢價能力。
- DMS系統(tǒng)本身的功能安全等級不超出該域控制器本身的功能安全等級。
a.智能座艙域集成DMS功能
智能座艙也在不斷地往智能化方向發(fā)展 —— 多屏互動、AR-HUD、擬人化人機交互和多模態(tài)人機交互等功能在智能座艙中變得越來越普遍。然而,DMS是多模態(tài)人機交互的重要組成部分,如果將DMS算法集成到智能座艙域,可以共享智能座艙域控制器算力,同時,便于基于座艙內(nèi)其它傳感器輸入的數(shù)據(jù)進行功能融合創(chuàng)新,進而打造更穩(wěn)定、更可靠、更精確的DMS解決方案。
DMS可以基于視覺,并結(jié)合面部表情與語音、手勢實現(xiàn)多模態(tài)交互,不斷豐富座艙的交互方式。比如,系統(tǒng)可以根據(jù)駕駛員的面部表情、語音和手勢動作來綜合判定判斷駕駛員的心情變化,從而自動調(diào)節(jié)車內(nèi)氛圍和播放音樂類型。
b.智能駕駛域集成DMS功能
除了融合到智能座艙域,DMS算法被集成到智能駕駛域也是另外一種比較主流的趨勢。
在人機共駕階段,DMS是必不可少的駕駛輔助系統(tǒng)。DMS系統(tǒng)不僅要監(jiān)控駕駛員是否分心或疲勞駕駛,同時還要確保駕駛員處于隨時能夠接管車輛的最佳狀態(tài)。DMS系統(tǒng)設(shè)計的成熟度甚至?xí)苯佑绊懙絃3級自動駕駛的落地時間。
智能駕駛系統(tǒng)可以根據(jù)DMS攝像頭的探測數(shù)據(jù),結(jié)合車輛行駛和控制狀態(tài)進行分析,判斷駕駛員是否處于疲勞駕駛,甚至脫離駕駛的狀態(tài),比如是否出現(xiàn)連續(xù)加速或減速、猛打方向、短時間內(nèi)車輛連續(xù)偏離既定車道等不穩(wěn)定駕駛狀態(tài)。如果駕駛員被判定處于不安全的駕駛狀態(tài),必要情況下系統(tǒng)會直接接管車輛,主動減速并安全靠邊停車。
總之,如果DMS與智能駕駛系統(tǒng)進行聯(lián)動,涉及到了車輛的控制。那么,DMS的功能安全設(shè)計要求必然會比較高。這種情況下,DMS算法集成到智能駕駛域控更合適。
3)艙內(nèi)視覺感知升級 — 從2D升維到3D
傳統(tǒng)2D攝像頭可以實現(xiàn)二維平面成像,而3D視覺感知是一種深度傳感技術(shù),能夠?qū)崿F(xiàn)三維成像,除了提供目標(biāo)對象的X和Y值之外,還能夠提供深度值。因此,3D視覺傳感器可以更加真實、準(zhǔn)確地呈現(xiàn)物體的形態(tài)與結(jié)構(gòu),再疊加AI大模型技術(shù)的應(yīng)用,有望成為智能座艙中主流的視覺感知技術(shù)。
目前3D視覺感知主要有3種技術(shù)實現(xiàn)路徑:雙目立體視覺、結(jié)構(gòu)光和 ToF。其中,雙目立體視覺是被動式成像,受環(huán)境光影響較大,適合中遠距離的戶外場景。結(jié)構(gòu)光和ToF屬于主動式成像方案,適合室內(nèi)外中短距離場景。
相比結(jié)構(gòu)光,ToF方案結(jié)構(gòu)簡單、可靠性更好;另外,據(jù)業(yè)內(nèi)相關(guān)人士透露,在模組成本方面,應(yīng)用結(jié)構(gòu)光技術(shù)的3D傳感攝像頭模組成本約為20美元,采用3D ToF技術(shù)的3D傳感攝像頭模組成本約為12~15美元,ToF技術(shù)方案具有明顯的成本優(yōu)勢。整體來看,ToF 技術(shù)將會是艙內(nèi)主流的3D視覺感知交互方案。
圖表30. 三種3D視覺感知方案對比

信息來源:華泰研究、億歐汽車、焉知汽車整理
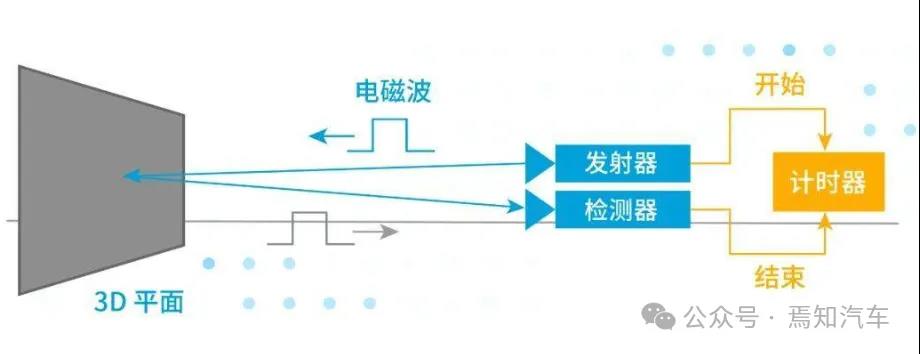
3D ToF(Time of Flight)工作原理: 首先使用調(diào)制的紅外光源主動向目標(biāo)物體發(fā)射光線脈沖,然后通過接收器接受返回的光信號,最后測量發(fā)射光和反射光之間的飛行時間或相位差得到目標(biāo)物體的深度信息。
圖表31. 3D ToF工作原理
目前,ToF方案正處于上車初期,在座艙內(nèi),主要用于實現(xiàn)的功能包括DMS/OMS、3D手勢控制、車內(nèi)駕駛員身份識別等。
圖表32. ToF 技術(shù)在座艙內(nèi)可實現(xiàn)的主要功能
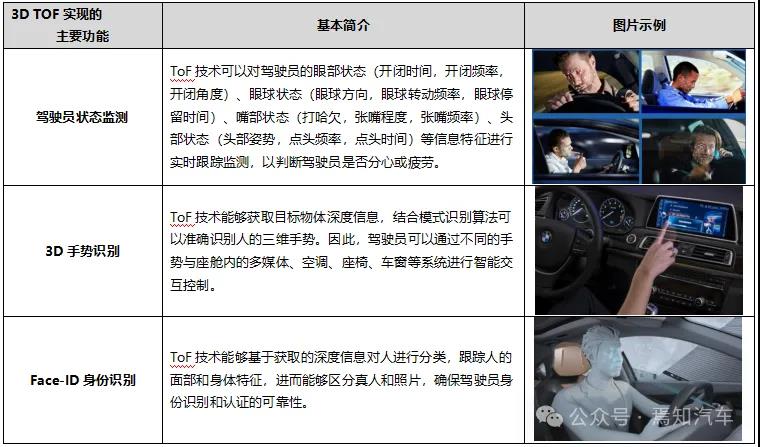
信息來源:公開資料整理
轉(zhuǎn)自焉知汽車
