
阿維塔可謂出身“富貴家庭”,由長安汽車、寧德時代、華為聯(lián)合打造,華為提供全套智能汽車解決方案,包括機(jī)械部分、高壓電氣系統(tǒng)、智能汽車和電子架構(gòu),下面從阿維塔11來看看其中的部分技術(shù)。
01. 電子架構(gòu)
上面提到電子架構(gòu)是由華為提供,早在2021年上海車展,華為展出了分布式以太網(wǎng)絡(luò)網(wǎng)關(guān)+域控制器(智能座艙CDC、整車控制VDC、智能駕駛MDC)的計算通信架構(gòu),如下圖所示。

▲圖1 華為2021提出的域控架構(gòu)
那實際落地是怎樣呢?下圖是阿維塔11的電子架構(gòu)簡圖,從圖中可以看到座艙域控CDC、智能駕駛MDC以及整車控制器VCU,與圖1中基本是一致的,

▲圖2 阿維塔11的電子架構(gòu)
其中網(wǎng)關(guān)與PTCANFD、PTSCANFD、CHDAND、TCANFD、RCANFD、ICANFD、BCAN相連,另外還具備100base_T1、100base_Tx、1000base_T1,其中網(wǎng)關(guān)與MDC、T-Box、CDC為千兆網(wǎng),網(wǎng)關(guān)與車身域控、VCU、OBD口為百兆網(wǎng)。
02. 智能座艙域
阿維塔的座艙無疑采用的是鴻蒙系統(tǒng),芯片采用的是麒麟990A系列,基于7nm制程打造,CPU采用了4+4的8核心設(shè)計,主頻最高為2.86GHz,AI算力為3.5TOPS。并搭載8GB運行內(nèi)存和128GB儲存內(nèi)存。下圖是座艙域控及其附件的示意框圖。
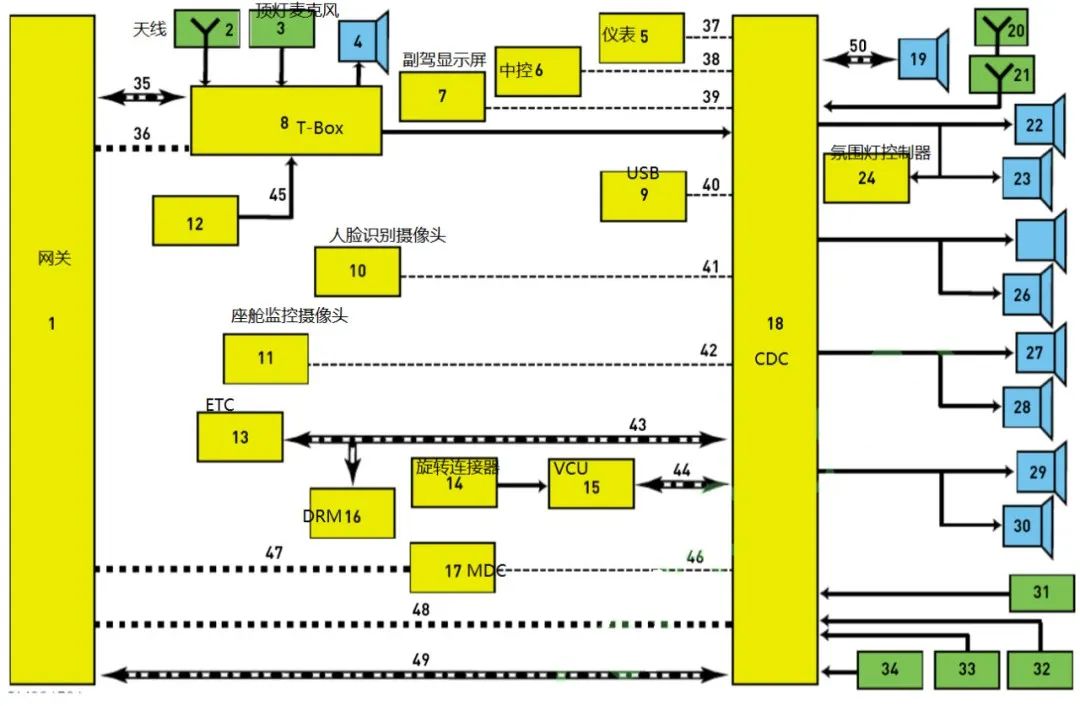
▲圖3 座艙及其連接附件圖
03.智能駕駛域
阿維塔11的另一個亮點就是其遙遙領(lǐng)先的智能輔助駕駛了,首先從硬件上來看,可謂配置豪華,MDC810+3顆激光雷達(dá)+6顆毫米波+13個攝像頭+12個超聲波探頭,總體的框圖如下圖所示。

▲圖4 智能駕駛硬件配置
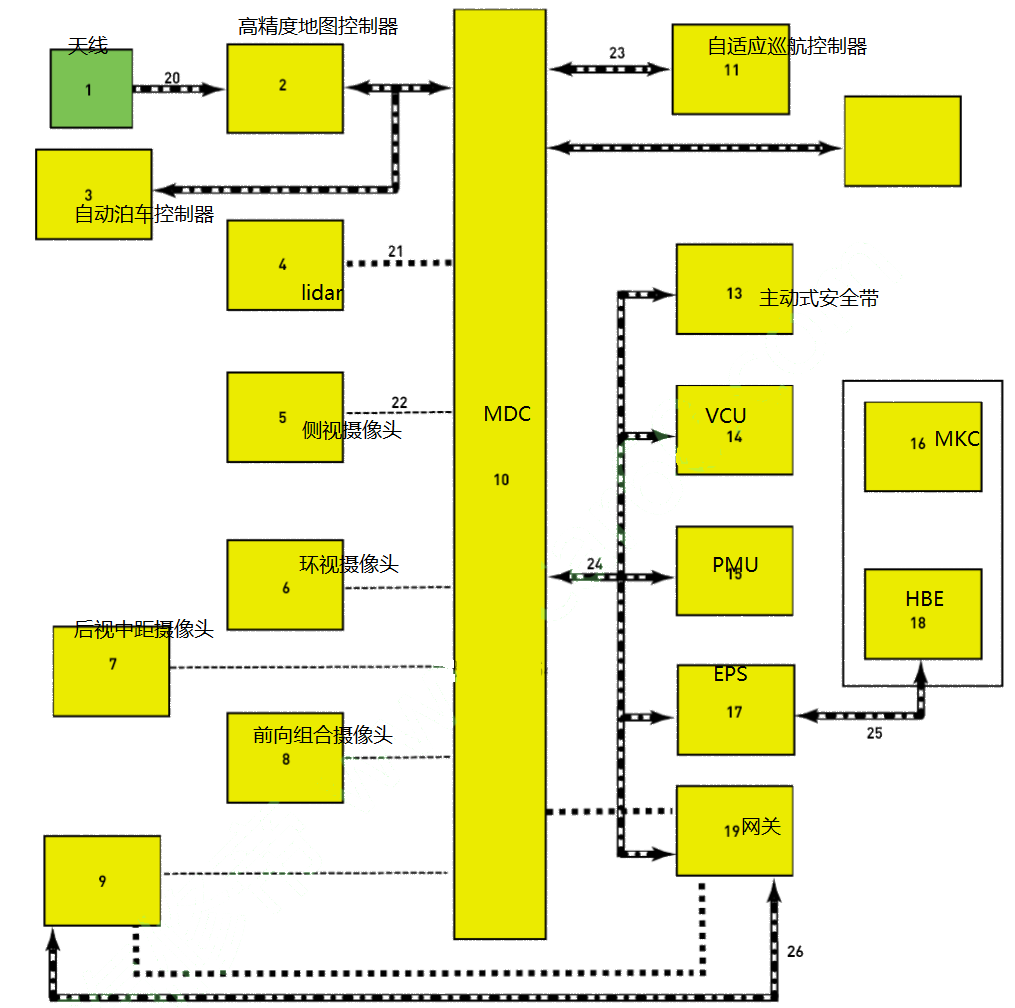
▲圖5 智能駕駛硬件拓?fù)鋱D
這里的核心就是MDC平臺,關(guān)于阿維塔,官方?jīng)]有給出具體是MDC610還是MDC810,不過對我們梳理影響不大,因為從華為智能駕駛平臺介紹來看, MDC平臺統(tǒng)一一套軟件架構(gòu),支持應(yīng)用的快速開發(fā)和系列化共享,全系列統(tǒng)一尺寸,支持平滑升級替換。也就是說應(yīng)該就是主控芯片不一樣,外圍的硬件和接口大差不差。
下面以MDC 610為例,其主控芯片組合采用一顆Ascend 610 + 一顆英飛凌TC397,其硬件架構(gòu)如圖2所示。
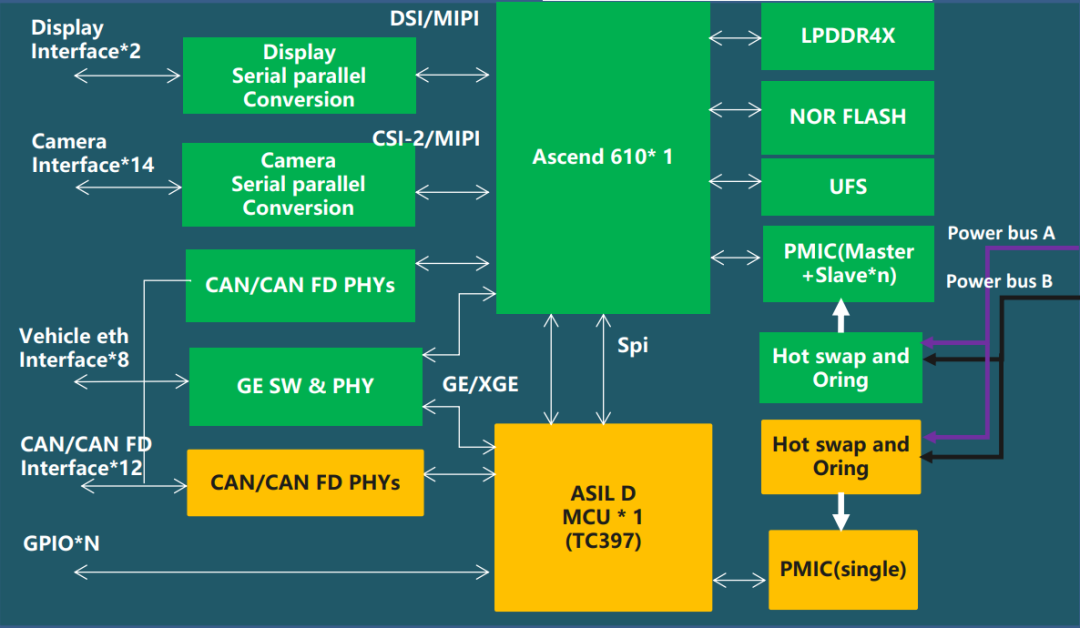
▲圖6 MDC 610硬件架構(gòu)
其各項指標(biāo)如下所示:
1. AI算力為200 Tops(int8),ARM CORE的整型算力為220K DMIPs;
2. 液冷版功耗約為120W;
3. 傳感器接口方面,14個LVDS攝像頭接口,8路以太網(wǎng)接口,12路CAN/CANFD接口,6路車載以太網(wǎng)接口,1路PPS接口,各個接口定義如下圖所示;
4. 防水等級為 IP67;

▲圖7 對外接口含義
在加速能力方面,首先是支持豐富的AI算子,包括支持業(yè)界主流的AI框架,如Caffe、Tensorflow、Pytorch、ONNX,支持400個以上的主流算子的算子庫;第二具備可配置硬件加速器,如圖4所示;第三具有Vector Core,提供矢量加速和CPU的scalar運算單元緊耦合,加速控制和數(shù)據(jù)并行運算混合的程序段,有利于頻繁遞歸的CV算法。
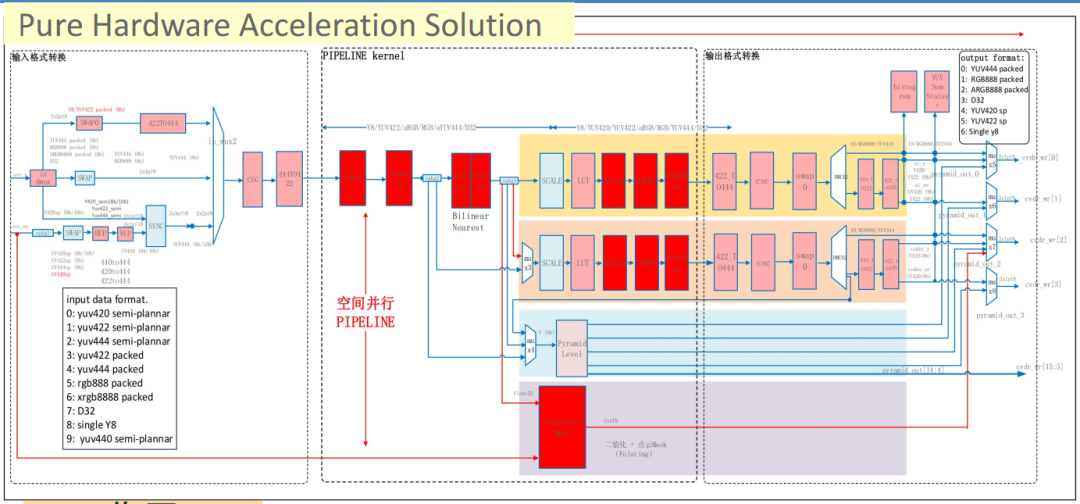
▲圖8 硬件加速解決方案
MDC 平臺軟件架構(gòu)如下圖所示,其核心為華為自主研發(fā)的AP+CP+OS。
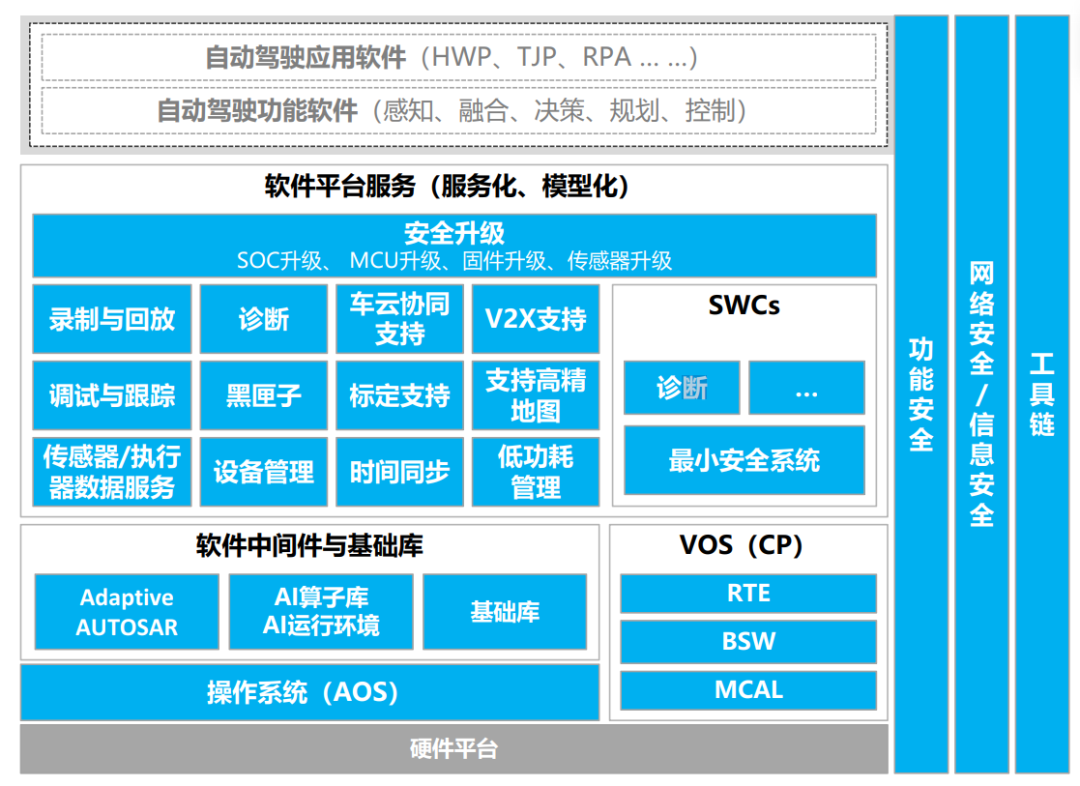
▲圖9 MDC軟件架構(gòu)
華為自主研發(fā)Adaptive Autosar符合符合R19-11規(guī)范(及以上),具備通信管理、執(zhí)行管理、狀態(tài)管理、升級管理、健康管理、持久化、時間同步、訪問管理、加密能力、診斷服務(wù)、網(wǎng)絡(luò)管理,如下圖所示,并且有符合Adaptive AUTOSAR 規(guī)范的配置工具。
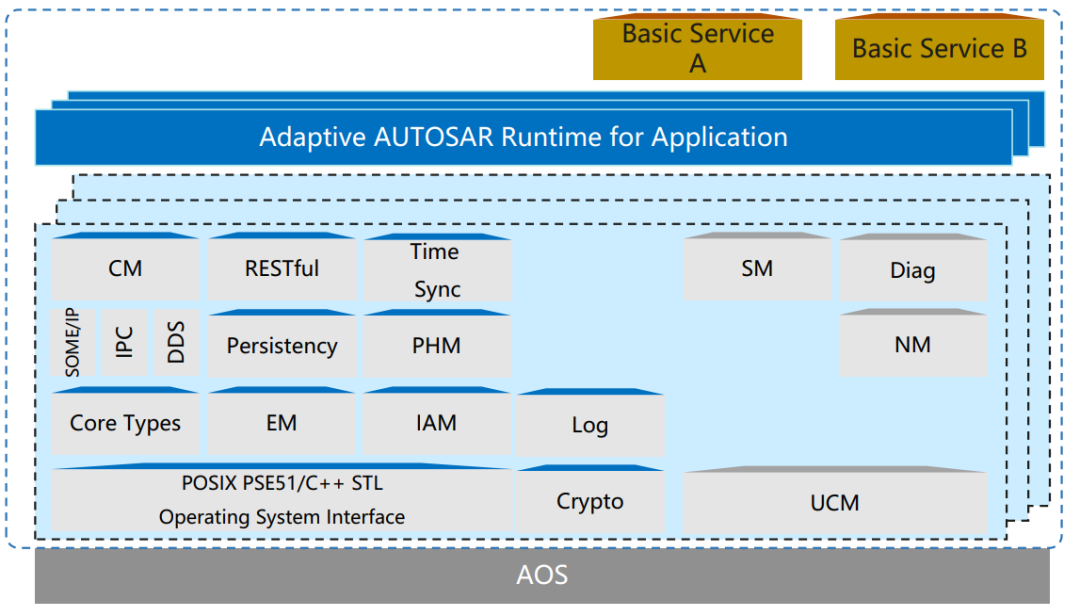
▲圖10 MDC Adaptive Autosar特性
AOS為華為自研的實時操作系統(tǒng),兼容Linux接口,具有確定性調(diào)度,低延遲,功能安全和Security特性,并且兼容Linux驅(qū)動框架和三方庫。
在開放方面,無縫兼容AUTOSAR,在安全方面,支持安全隔離,Safety-Critical與Non-Critical應(yīng)用安全隔離,軟硬件Co-Design,去中心化架構(gòu),屏蔽單點軟硬件故障,在確定性延遲方面是開源Linux的十分之一,內(nèi)核延時小于10us,支持CC EAL4++。
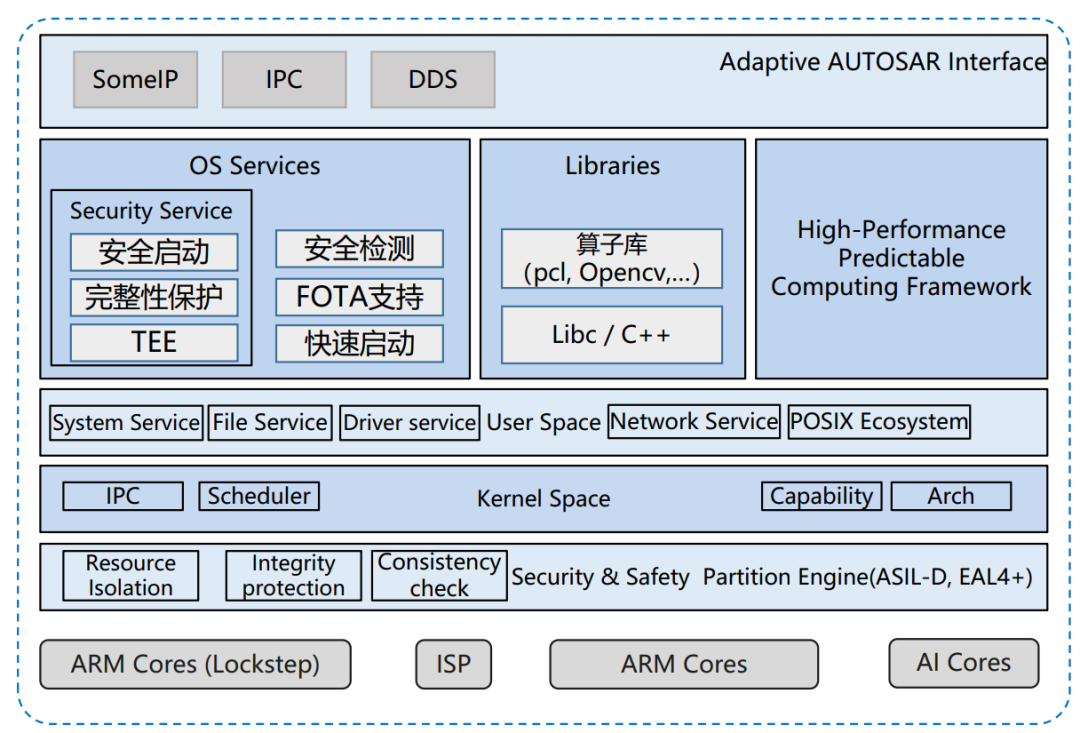
▲圖11 AOS軟件框架
最后在CP方面,有基于Classic AUTOSAR標(biāo)準(zhǔn)的VOS,滿足AUTOSAR CP4.4規(guī)范,提供完整的CAN/ETH協(xié)議棧、診斷、NM、標(biāo)定、存儲等功能和服務(wù),提供高功能安全的運行環(huán)境,支持客戶開發(fā)/部署ASIL-D級別的業(yè)務(wù) 。并且如主流的AUTOSAR工具一樣,圖形化建模&開發(fā)工具,支持客戶進(jìn)行SWC的開發(fā)、BSW的配置等。
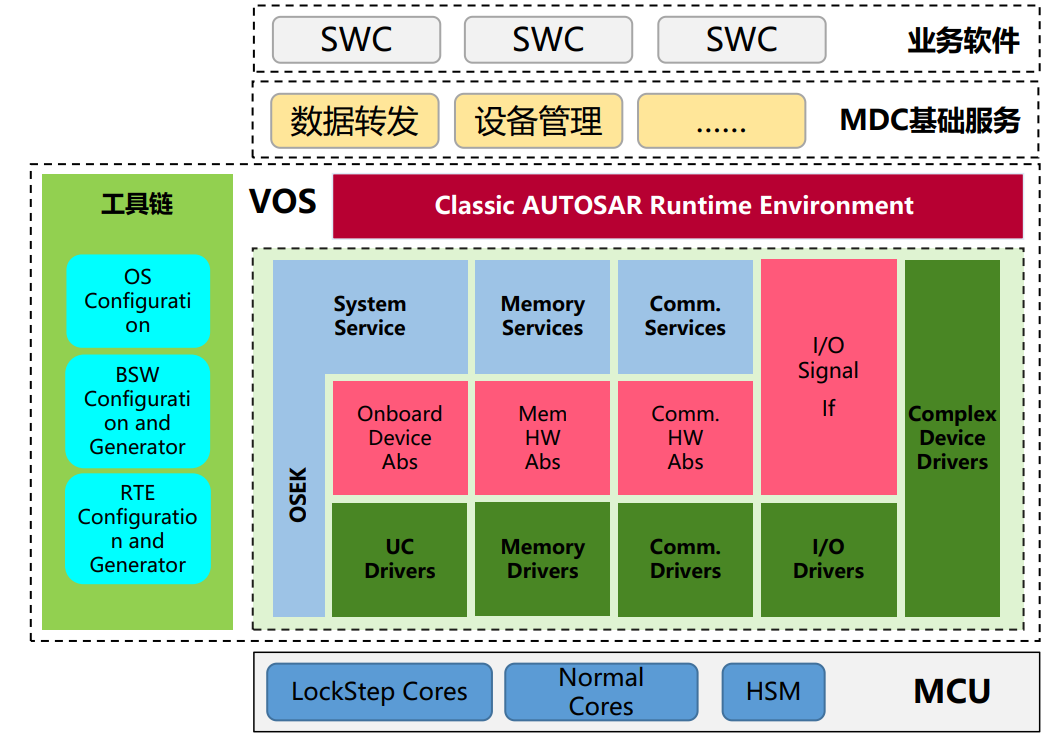
▲圖12 VOS軟件框架
轉(zhuǎn)自汽車ECU開發(fā)
